7
Motion Commands
7.2.23
Torque Reference (TRQ)
7-86
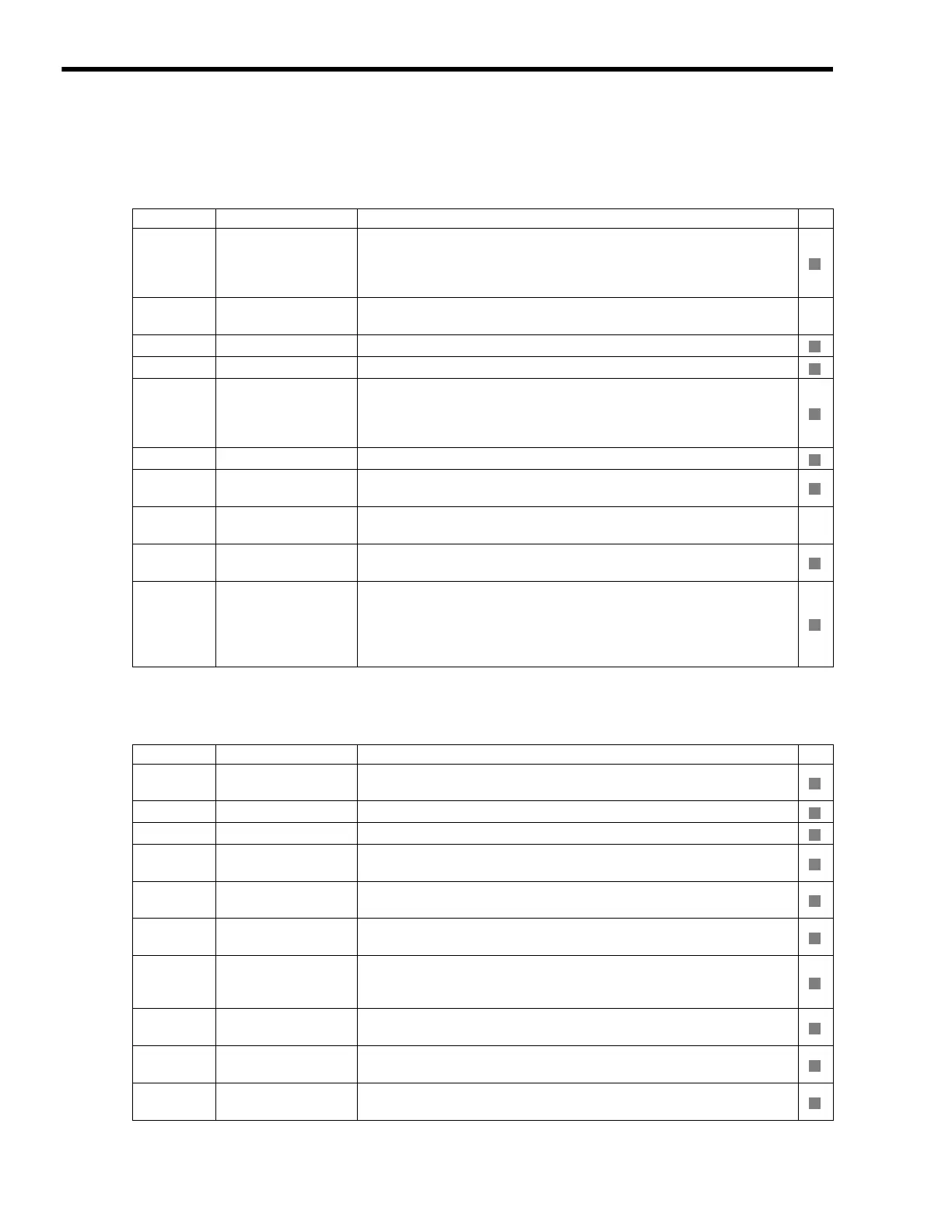
( 4 ) Related Parameters
[ a ] Setting Parameters
[ b ] Monitoring Parameters
Parameter Name Setting SVR
OB
000
Servo ON
Turn the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Motor torque will start to rotate when the Servo is turned ON after switching to
Torque Control Mode.
OB
013
Speed Loop P/PI
Switch
Switch the speed control loop between PI control and P control.
0: PI control, 1: P control
−
OW
03
Function 1
Set the speed unit, acceleration/deceleration unit, and filter type.
OW
08
Motion Command
The mode is changed to torque control when this parameter is set to 24.
OB
090
Command Pause
The axis will decelerate to a stop if this bit is set to 1 during speed command
operation.
The positioning operation will restart if this bit is set to 0 while the command is
being held.
OB
091
Command Abort
A deceleration stop is performed when this bit set to 1 during operation.
OL
0C
Torque Reference
Set the torque reference. This setting can be changed during operation.
The unit depends on the Function 1 (OW
03).
OL
0E
Speed Limit at Torque
Reference
Set the speed limit for torque references. The speed limit is set as a percentage of
the rated speed.
−
OL
38
Linear Deceleration
Time
Set the rate of deceleration or deceleration time for positioning.
OW
3A
S-Curve Acceleration
Time
Set the acceleration/deceleration filter time constant. Exponential acceleration/
deceleration or a moving average filter can be selected in the Function 1
(OW
03).
Change the setting only after pulse distribution has been completed for the
command (IB
0C0 is ON).
Parameter Name Monitor Contents SVR
IB
001
Servo ON
Indicates the Servo ON status.
ON: Power supplied to Servomotor, OFF: Power not supplied to Servomotor
IL
02
Warning
Stores the most current warning.
IL
04
Alarm
Stores the most current alarm.
IW
08
Servo Command
Type Response
Indicates the motion command that is being executed.
The response code will be 24 during TRQ command execution.
IB
090
Command Executing
Turns ON when abort processing is being performed for TRQ command. Turns
OFF when abort processing has been completed.
IB
091
Command Hold
Completed
Always OFF for TRQ command.
IB
093
Command Error End
Turns ON if an error occurs during TRQ command execution.
The axis will decelerate to a stop if it is operating. Turns OFF when another
command is executed.
IB
098
Command Execution
Completed
Always OFF for TRQ command.
IB
0C0
Distribution
Completed
Turns ON when pulse distribution has been completed for the move command.
Turns OFF during execution of a move command.
IB
0C1
Positioning
Completed
Turns ON when pulse distribution has been completed and the current position is
within the positioning completed width. OFF in all other cases.
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R

 Loading...
Loading...




