9.4
Absolute Position Detection for Infinite Length Axes
9-21
( 2 ) Infinite Length Axis Position Control without Simple Absolute Positions
The MP2300 performs the following infinite length position control when the Simple Absolute Infi-
nite Length Position Control Function is not used.
The modularized position and absolute position are always stored as paired information in backup
memory. This information is used the next time power is turned ON as the modularized position and
the absolute position at shutdown to find the relative encoder position in pulses.
• Modularized position = Modularized position at power OFF + (Absolute position - Absolute posi-
tion at power OFF)*
* The portion in parentheses ( ) represents the moving amount while the power is OFF.
Terminology: Absolute position
Absolute encoder position information (Multiturn data
×
Number of encoder pulses + Initial increment
pulses)
Terminology: Modularized Position
The position information from the MP2300 converted to pulses
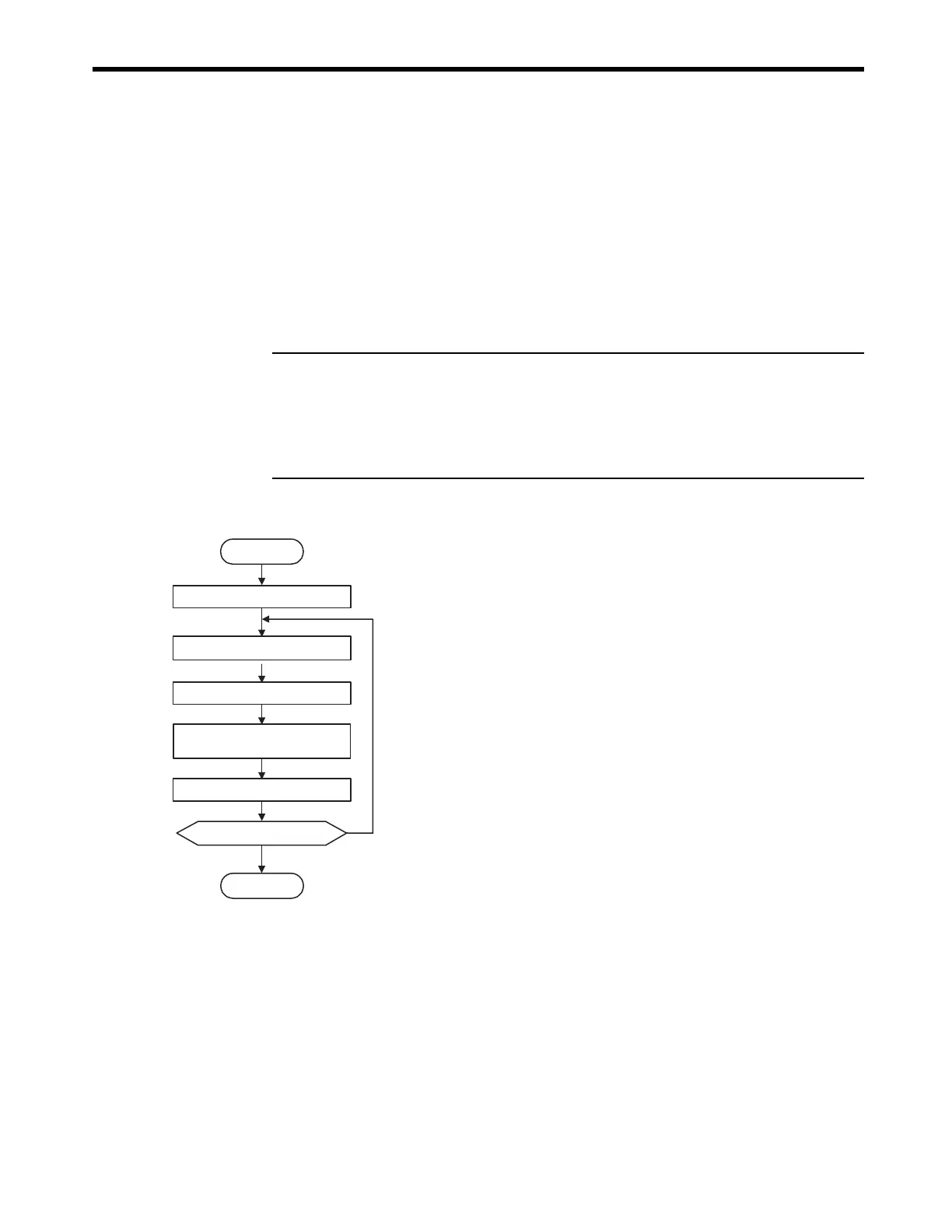
( 3 ) Setting the Zero Point for an Infinite Length Axis without Simple Absolute Positions
Repeat for every axis.
Start
Servo ON
STEP to move to the zero point.
End
YES
NO
JOG to move close to the zero
point.
Set the desired position at
OL䂔䂔48.
Has the setting for the required
axis been completed?
Use the ZSET command to set
the zero point.
Perform the procedure shown in the figure on the left
to set the zero point for infinite length position control
without simple absolute positions.
The OL
48 value (information of the zero point) does
not have to be stored in an M register with this method. Set
a desired position in OL
48 and execute the ZSET com-
mand to set the zero point . With this setting, the current po-
sition of the machine coordinate system will be set.
Example:
To set the current position of the machine coordinate
system to 0 when executing the ZSET command,
set
OL48 to 0
.

 Loading...
Loading...




