12
Maintenance and Inspection
12.6.2
Motion Error Details and Corrections
12-26
( 10 ) Bit 10: Filter Type Change Error
The command running will not stop even if the above error occurs. The stop processing from the
user program is needed to stop running commands when necessary.
( 11 ) Bit 11: Filter Time Constant Change Error
The command running will not stop even if the above error occurs. The stop processing from the
user program is needed to stop running commands when necessary.
( 12 ) Bit 13: Zero Point Not Set
( 13 ) Bit 16: Servo Driver Synchronization Communication Error
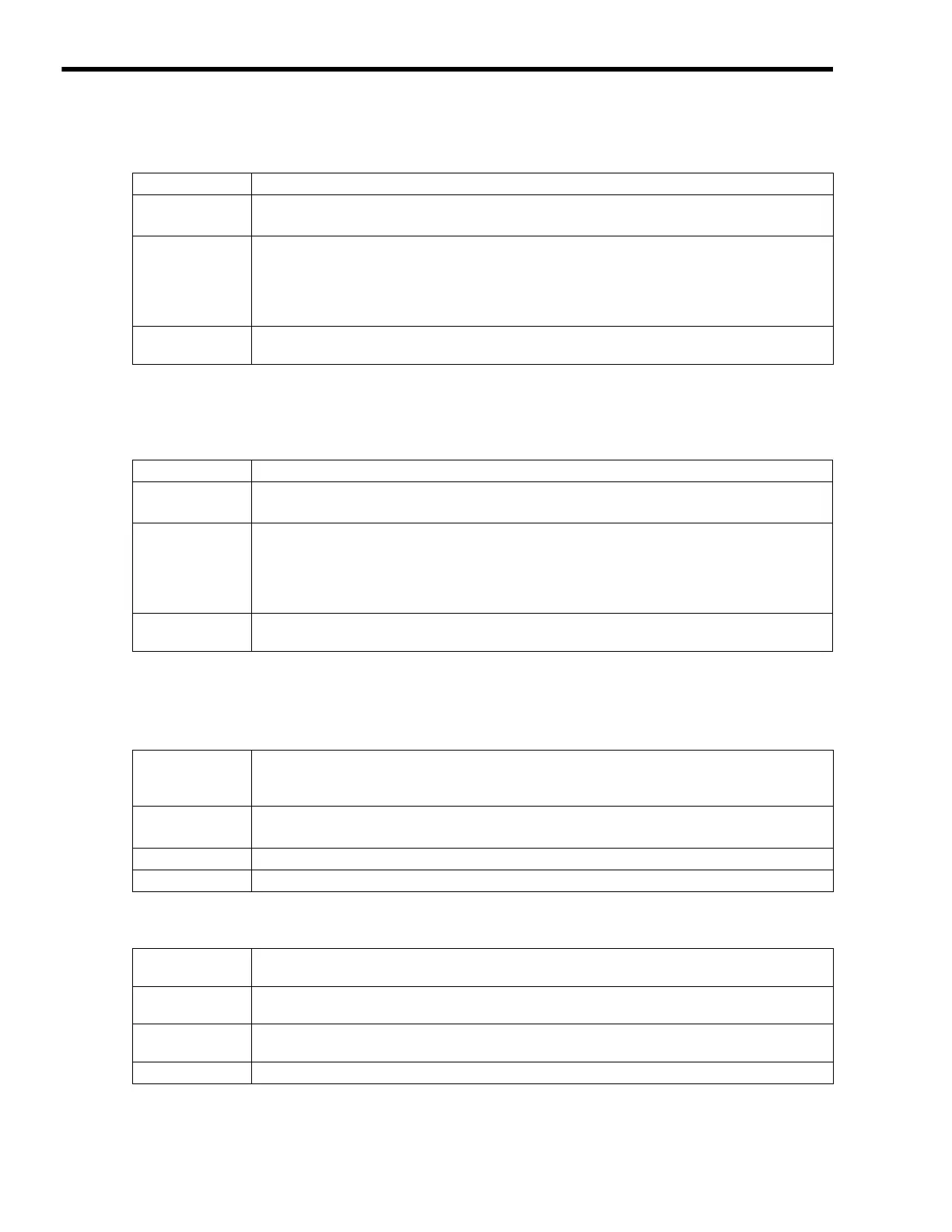
Detection Timing
• Continuously monitored by the motion command processing section.
Processing when
Alarm Occurs
• The Change Filter Type command will not be executed.
• The Command Error Occurrence in the Servo Module Command Status (IW
09 bit 3) will turn ON.
Error and Cause
• Interpolation Commands (Interpolation or Interpolation with Position Latch)
An error occurs if the Change Filter Type command is executed before the specified pulse distribution has
not been completed (i.e., when IB
0C0 was OFF).
• Positioning Commands (Positioning, External Positioning, STEP Operation, or JOG Operation)
The Change Filter Type command will be ignored. (An error will not occur.)
Correction
• Correct the program to execute the Change Filter Type command after Distribution Completed status (i.e.,
that IB
0C0 is ON) is checked.
Detection Timing
• Continuously monitored by the motion command processing section.
Processing when
Alarm Occurs
• The SCC (Change Filter Time Constant) command will not be executed.
• The Command Error Occurrence in the Servo Module Command Status (IW
09 bit 3) will turn ON.
Error and Cause
• Interpolation Commands (Interpolation or Interpolation with Position Latch)
An error occurs if the SCC command is executed before the specified pulse distribution has not been
completed (i.e., when IB
0C0 was OFF).
• Positioning Commands (Ppositioning, External Positioning, STEP Operation, or JOG Operation)
The Change Filter Time Constant command will be ignored. (An error will not occur.)
Correction
• Correct the program to execute the SCC command after Distribution Completed status (i.e., that
IB
0C0 is ON) is checked.
Detection Timing
• Enabled only when an absolute encoder is used for an infinite length axis and detected when the next
command is set in the Motion Command (OW
08).
Commands: Positioning, External Positioning, Interpolation, or Latch
Processing when
Alarm Occurs
• The set command will not be executed.
• The Command Error Occurrence in the Servo Module Command Status (IW
09 bit 3) will turn ON.
Error and Cause
• A move command was set without executing the ZSET command (IW
0C bit 5 is OFF).
Correction
• After clearing the motion command and resetting the alarm, execute a Zero Point Setting operation.
Detection Timing
• Detected by the communication control section when communication are synchronized between the
MP2300 and SERVOPACK.
Processing when
Alarm Occurs
• The current command will be aborted.
Error and Cause
• An error occurred in MECHATROLINK communication (e.g., cable disconnect or noise interference on
communication line).
Correction
• Check the MECHATROLINK cable and reset the alarm.

 Loading...
Loading...




