Introduction Parameter x.00
Parameter
description format
Keypad and
display
CT Modbus
RTU
User
programming
CT Soft Menu 0
Advanced parameter
descriptions
Menu 11
Commander SK Advanced User Guide 121
Issue Number: 2 www.controltechniques.com
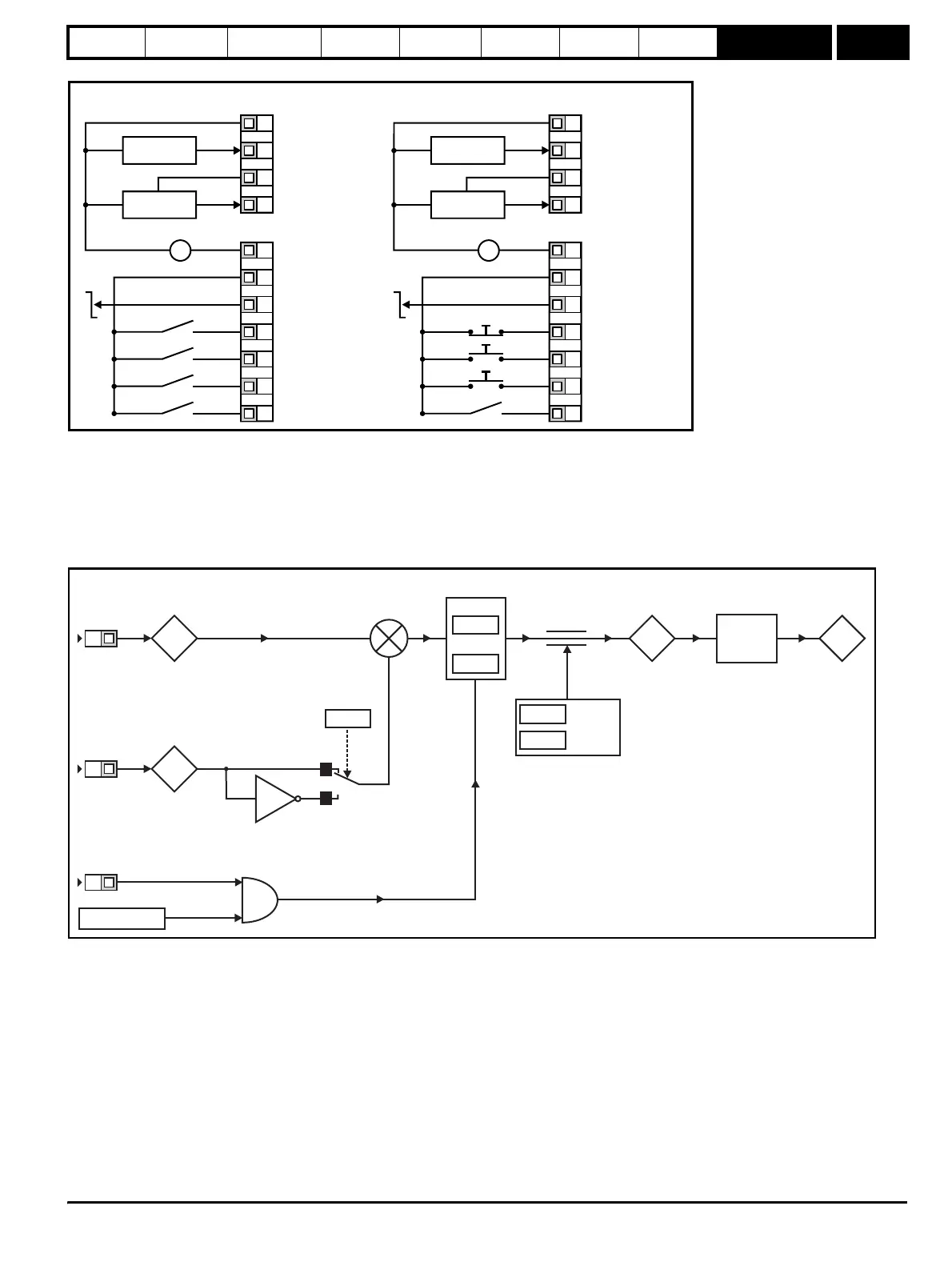
Figure 9-33 Pr 11.27 = Pid
When Pr 11.27 is set to Pid, the following parameters are made available for adjustment:
•Pr 14.10: PID proportional gain
•Pr 14.11: PID integral gain
•Pr 14.06: PID feedback invert
•Pr 14.13: PID high limit (%)
•Pr 14.14: PID low limit (%)
•Pr 14.01: PID output (%)
Figure 9-34 PID logic diagram
0V
+10V reference output
+24V output
Drive Enable/Reset
Run Forward
Run Reverse
4-20mA PID
feedback input
V
_
+
+24V
0V
EUR U
A
Analog output
(motor speed)
Digital output
(zero speed)
PID feedback input
PID reference input
PID enable
0-10V PID
reference input
0V
+10V reference outpu
+24V output
Not stop
Run
Jog
4-20mA PID
feedback input
V
_
+
+24V
0V
Analog output
(motor speed)
Digital output
(zero speed)
PID reference input
PID enable
0-10V PID
reference input
PID feedback input
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
7.02
7.01
%
T4
T2
x(-1)
0
1
14.06
Invert
14.10
P Gain
14.11
I Gain
PID reference
input
%
PID feedback
input
B7
PID enable
&
Drive healthy
14.13
PID high
limit
14.14
PID low
limit
14.01
%
1.01
Drive
reference
Hz
%to
frequency
conversion
+
_