Menu 21 Introduction Parameter x.00
Parameter
description format
Keypad and
display
CT Modbus
RTU
User
programming
CT Soft Menu 0
Advanced parameter
descriptions
160 Commander SK Advanced User Guide
www.controltechniques.com Issue Number: 2
This parameter is a symmetrical limit on both directions of rotation.
Defines drive absolute maximum frequency reference. Slip compensation and current limit can increase the motor frequency further.
Used in unipolar mode to define drive minimum set speed. This can be overridden if the maximum set speed clamp Pr 21.01 is adjusted to be less
than Pr 21.02. Inactive during jogging.
This parameter is used to select a speed reference for motor 2 as follows:
0: AI.AV Analog reference 1 or 2 selected by terminal input
1: AV.Pr Analog reference 1 (voltage) or Presets selected by terminal input
2: AI.Pr Analog reference 1 (current) or Presets selected by terminal input
3: Pr Preset reference selected by terminal
4: PAd Keypad reference selected
5: Prc Precision reference selected
When this parameter is set to 0 the reference selected depends on the state of bit parameters Pr 1.41 to Pr 1.44. These bits are for control by digital
inputs such that references can be selected by external control. If any of the bits are set, the appropriate reference is selected (indicated by Pr 1.49).
If more than one bit is set the highest numbered will have priority.
In modes 1 and 2 a preset speed will be selected instead of the voltage or current selection, if the preset selected is any preset speed other than
preset speed 1. This gives the user the flexibility to be able to select between voltage and 3 presets, or current and three presets, with only two digital
inputs.
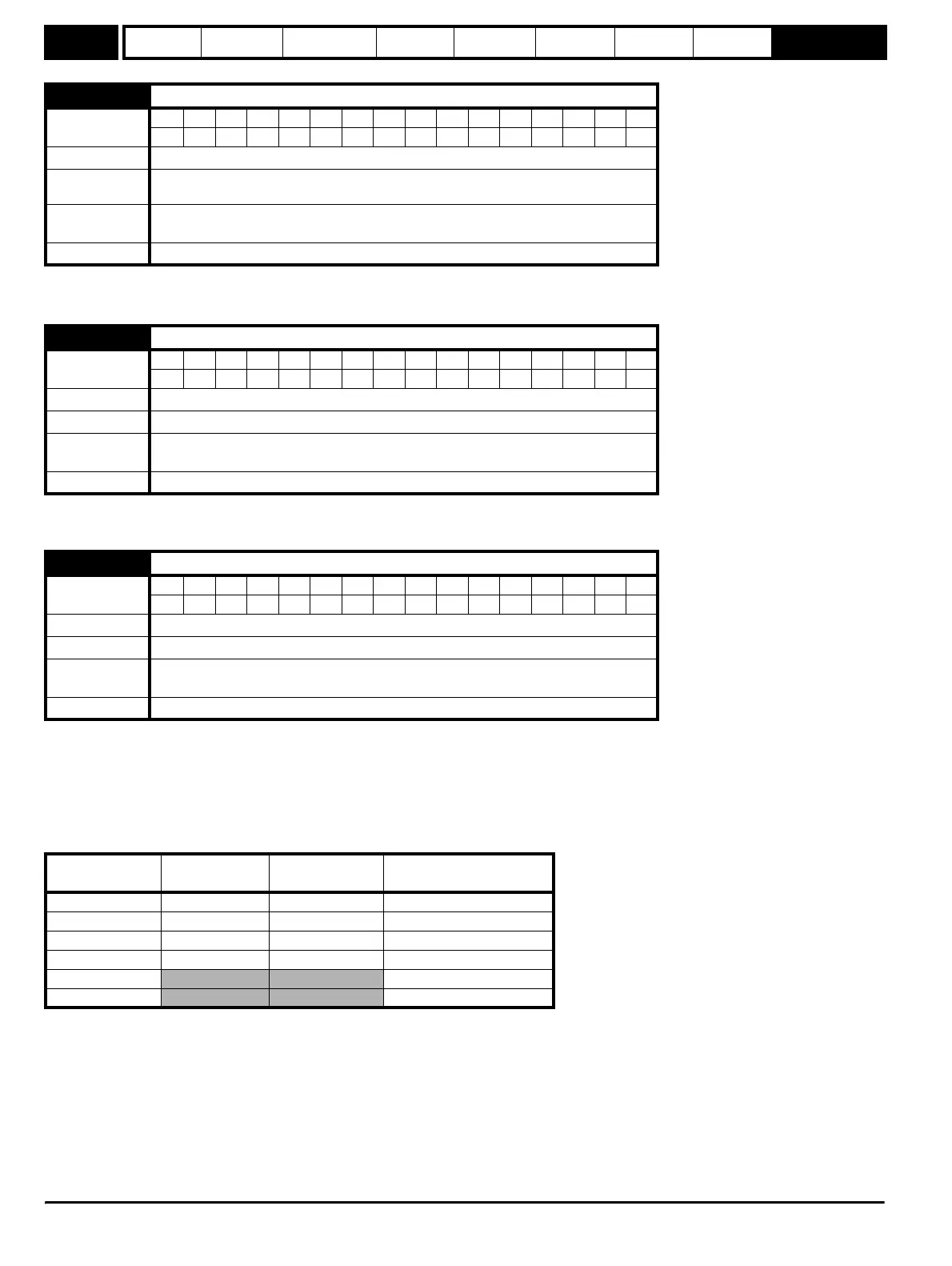
21.01 Motor 2 maximum set speed
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range 0.0 to 1500.0 Hz
Default
EUR: 50.0
USA: 60.0
First motor
parameter
Pr 1.06
Update rate Background
21.02 Motor 2 minimum set speed
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
11 111
Range 0.0 to 1500.0 Hz
Default 0.0
First motor
parameter
Pr 1.07
Update rate Background
21.03 Motor 2 reference selector
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range 0 to 5
Default 0 (AI.AV)
First motor
parameter
Pr 1.14
Update rate 5ms
Pr 21.03
Terminal T4
destination
Terminal B7
destination
Pr 1.49
0 (AI.AV) Pr 1.37 Pr 1.41 Selected by terminal input
1 (AV.Pr) Pr 1.45 Pr 1.46 1
2 (AI.Pr) Pr 1.45 Pr 1.46 2
3 (Pr) Pr 1.45 Pr 1.46 3
4 (PAd)
4
5 (Prc)
5