Introduction Parameter x.00
Parameter
description format
Keypad and
display
CT Modbus
RTU
User
programming
CT Soft Menu 0
Advanced parameter
descriptions
Menu 12
Commander SK Advanced User Guide 135
Issue Number: 2 www.controltechniques.com
9.13.1 Brake control function
The brake control function can be used to control an electro-mechanical brake via the drive digital I/O.
This parameter should be used as a source for a digital output to control an electro-mechanical brake. This parameter is one to release the brake and
zero to apply the brake. Digital I/O can be automatically configured to use this parameter as a source (see Pr 12.41).
Action will only occur if the drive is inactive. If the drive is active the parameter will return to its pre altered value on exit from edit mode.
0diS
The brake controller is disabled and no other drive parameters are affected by the brake controller. When this parameter is changed from a non-zero
value to zero Pr 2.03 is set to zero.
1rEL
The brake controller is enabled with I/O set up to control the brake via the relay output. Drive healthy is re-routed to digital I/O.
2 d IO
The brake controller is enabled with I/O set up to control the brake via digital I/O.
3 USEr
The brake controller is enabled, but no parameters are set to select the brake output.
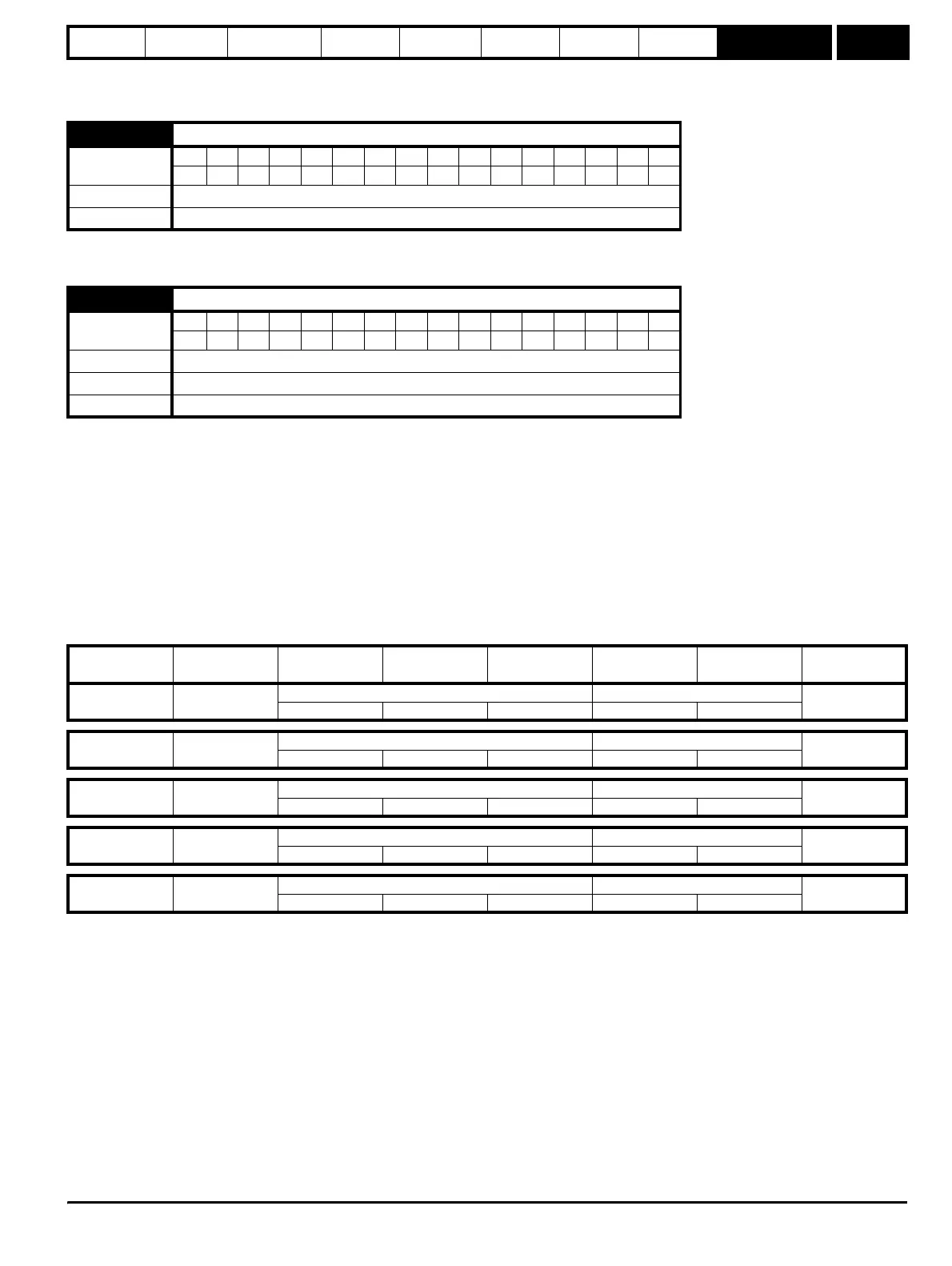
The following table shows the automatic parameter changes that occur to set up digital I/O and the relay output after exit from edit mode or drive reset
when Pr 12.41 has been changed.
12.40 Brake release indicator
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range 0 or 1
Update rate 21 ms
12.41 Brake controller
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Range 0 to 3
Default 0
Update rate Actioned on exit of edit mode and on drive reset
Old value of
Pr 12.41
New value of
Pr 12.41
Pr 8.11 Pr 8.21 Pr 8.31 Pr 8.17 Pr 8.27 Pr 8.41
Any 1
Drive healthy output Brake release output
3
0Pr 10.01 10Pr 12.40
Not 1 2
Brake release output
8
0Pr 12.40 1 No change No change
12
Brake release output Drive healthy output
8
0Pr 12.40 10Pr 10.01
10 or 3
Zero speed output Drive healthy output
0
0Pr 10.03 10Pr 10.01
20 or 3
Zero speed output
0
0Pr 10.03 1 No change No change