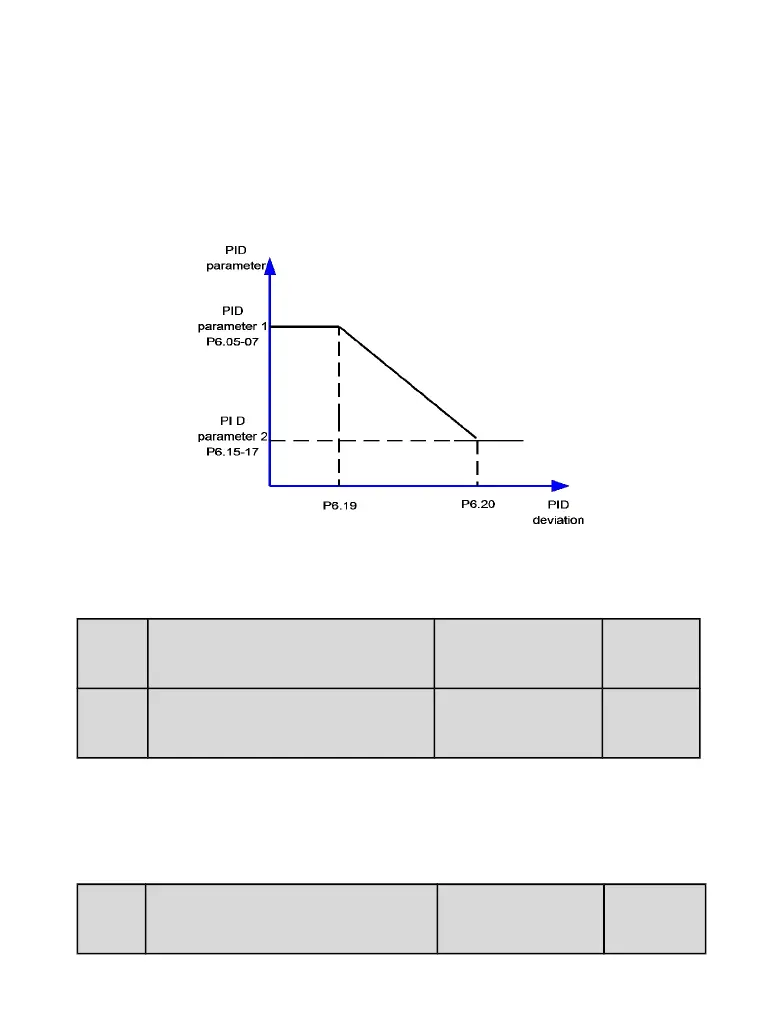
feedback and PID setting is smaller than the value of P6.19, group 1 is selected. When the
absolute value of the deviation between PID feedback and PID setting is higher than the
value of P6.20, group 2 is selected. When the deviation is between P6.19 and P6.20, the
PID parameters are the linear interpolated value of the two groups of parameter values.
Figure 6-27 PID parameters switchover
P6.21 PID initial value Setting Range:
0.0%~100.0%
【0.0%】
P6.22 PID initial value holding time Setting Range:
0.00~650.00s
【0.00s】
When the AC drive starts up, the PID starts closed-loop algorithm
only after the PID output is fixed to the PID initial value (P6.21)
and lasts the time set in P6.23, see figure 6-28.
P6.23 Maximum deviation between two PID
outputs in forward direction
Setting Range:
0.0%~100.0%
【1.00%】