FARO Edge
September 2012
81
Chapter 6: Maintenance and Troubleshooting
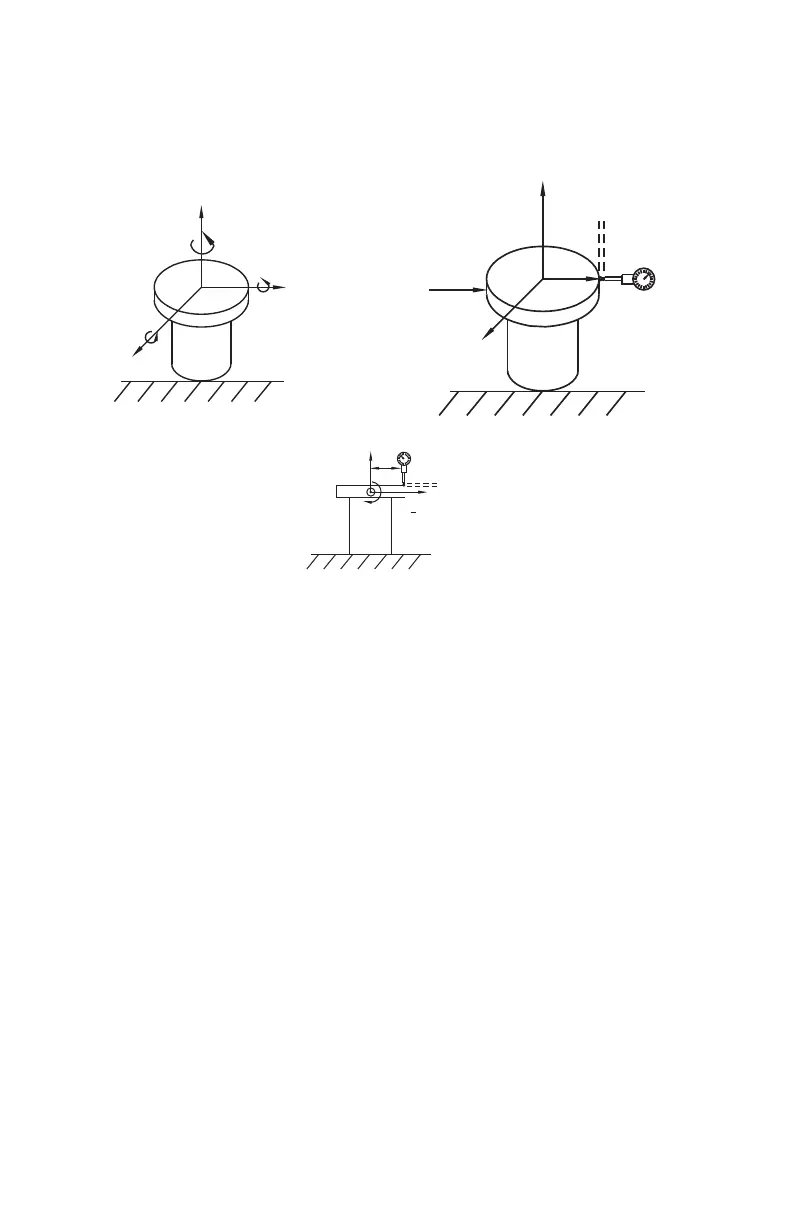
and can be measured. The deformations must not exceed the deformation
reported at calibration.
In general, the excessive translation deformations are added directly to the
certified accuracy, while the excessive angular deformations of the base affect
accuracy as a more complicated trigonometric function of the length of the reach.
Temperature Considerations
FARO was awarded the U.S. patent #5,402,582, and worldwide patents are
pending, on the concept and the methods for temperature compensation of
portable CMM devices. This brief overview is meant only as the most general of
descriptions.
To maintain certified accuracy in a multitude of environments, the monitoring of
temperature and the rate of temperature change is required. Only the Edge
employs a software/hardware solution where a semiconductor temperature sensor
is built into each joint.
The temperature is continuously monitored and the difference over time is then
applied to the mathematical formulas or kinematics, which define the position of
the Edge in three-dimensional space. Link length corrections are made constantly
by the inboard processor, which adjusts the kinematics and constantly adapts the
output to changing environmental temperature.
Forces Encountered due to
Counterbalancing
Displacement due to Force
Rotation due to Torque
FY
Y
M
Y
Mx
Moments (about X)
XF
X Forces (along X)
M
Z
Z
F
Z
Force
Displacement
due to Force
D
L
D
D
Rotation due to Torque
L
T
08M52E00_FaroArm_Edge.book Page 81 Thursday, October 4, 2012 9:31 AM