6 - 23
6 Basic Control Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
6-7 Profile Velocity Mode
6
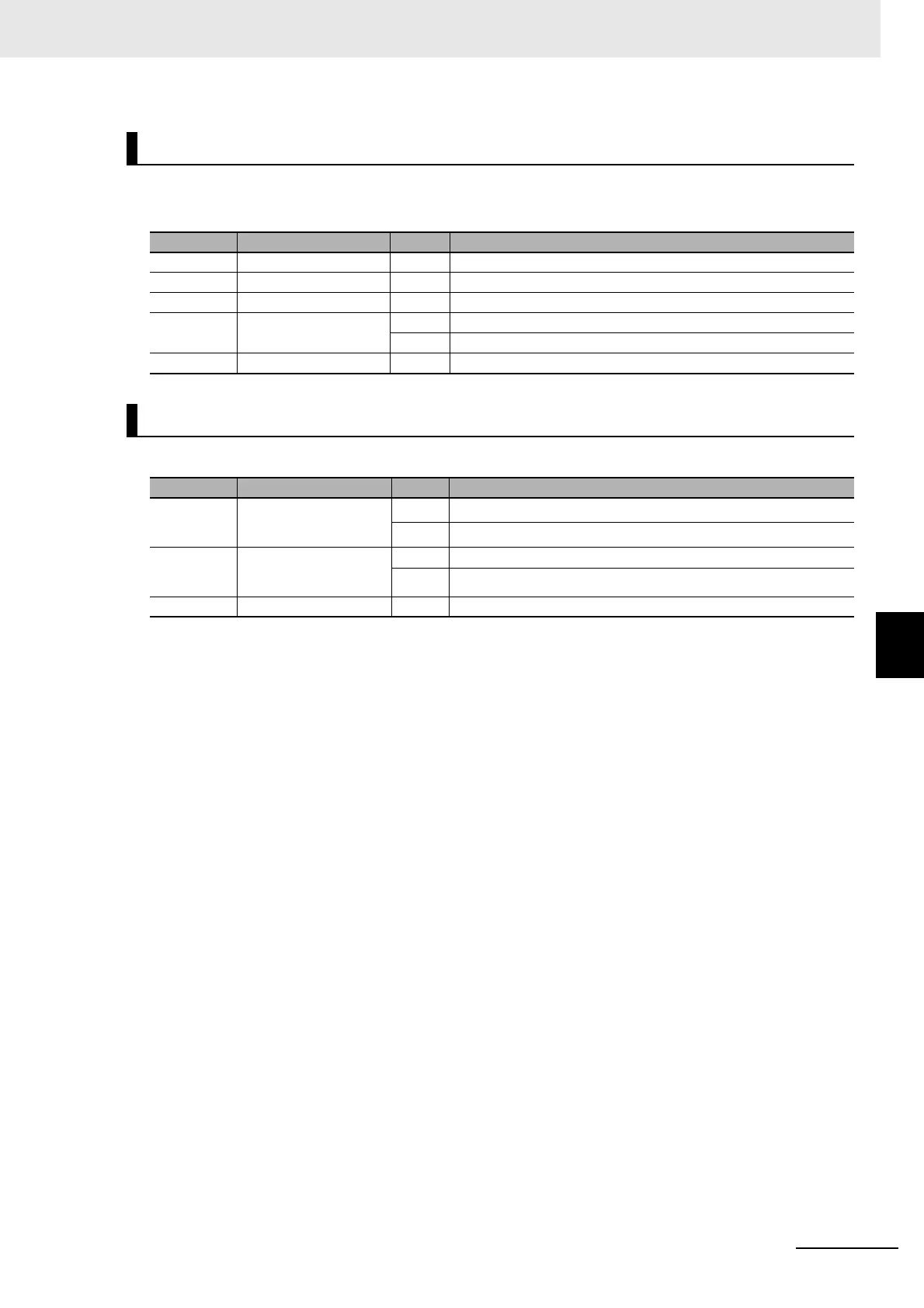
The bits in Controlword used in the Profile position mode are explained below.
For the bits that are common to all modes, refer to A-1 CiA 402 Drive Profile on page A-2.
The bits in Statusword used in the Profile position mode are explained below.
Controlword (6040 hex) in Profile Velocity Mode
Bit Name Value Description
4 Not used. --- ---
5 Not used. --- ---
6 Not used. --- ---
8Halt
0 Velocity control starts or continues.
1 Stop axis according to the Halt option code (605D hex).
9 Not used. --- ---
Statusword (6041 hex) in Profile Velocity Mode
Bit Name Value Description
10 Target reached
0 Target velocity not reached
1 Target velocity reached
12 Speed
0 Zero speed not detected
1 Zero speed detected
13 Not used. 0 ---

 Loading...
Loading...

