11 - 15
11 Adjustment Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
11-7 Damping Control
11
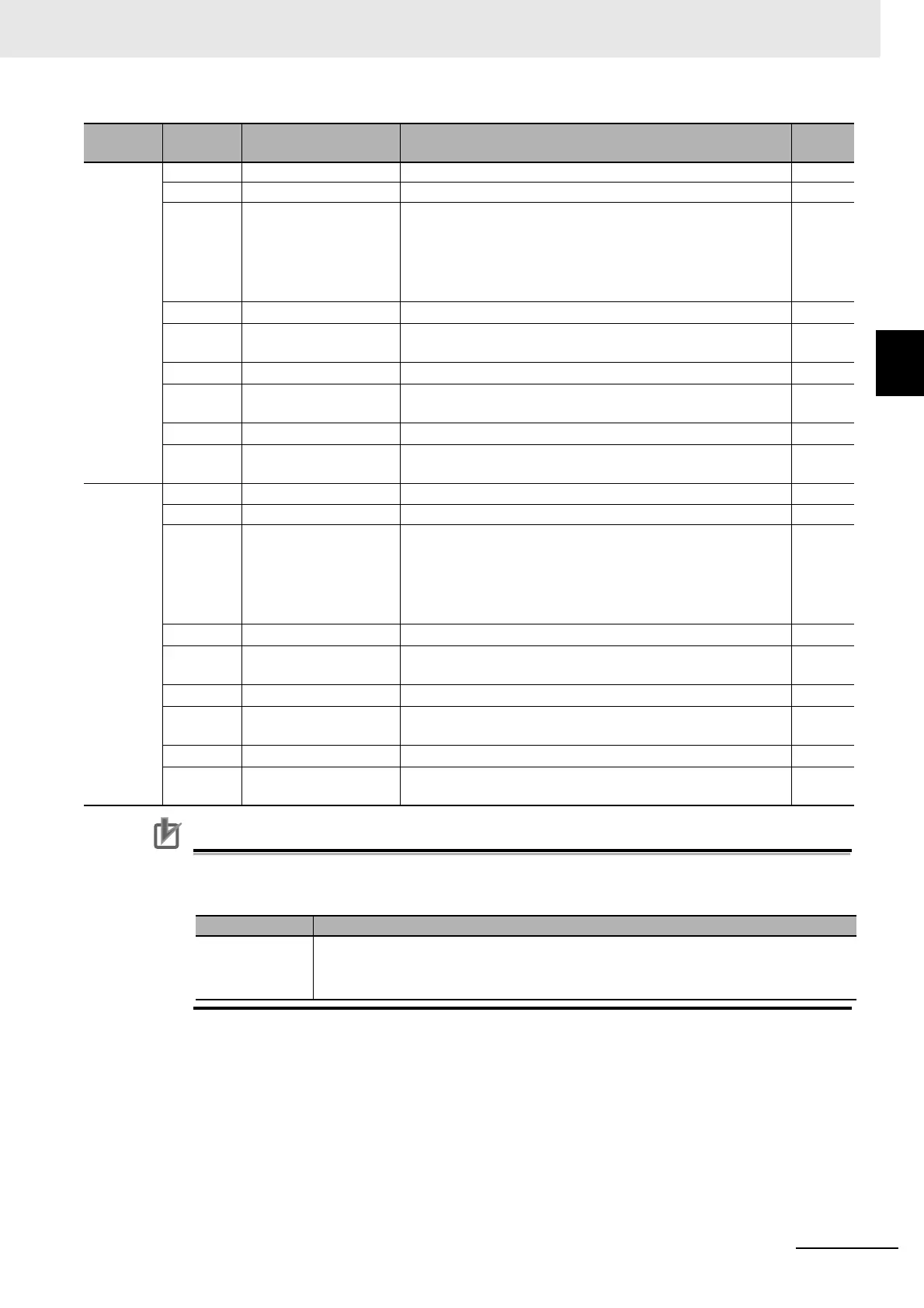
11-7-1 Objects Requiring Settings
Precautions for Correct Use
• Stop operation before changing the object settings.
• Damping control may not function properly or have no effect under the following conditions.
3013
---
Damping Filter 1 Sets the damping filter 1. P. 9-19
01 1st Frequency Sets the damping frequency for the damping filter. P. 9-19
02 1st Damping Time
Coefficient
Sets the trade-off with torque required for the vibration sup-
pression time and damping.
Setting a small value shortens the time to suppress the vibra-
tion, however it is highly possible that torque saturation
occurs.
P. 9-19
03 2nd Frequency
The function is the same as 01
hex.
P. 9-19
04 2nd Damping Time
Coefficient
The function is the same as 02
hex.
P. 9-19
05 3rd Frequency
The function is the same as 01
hex.
P. 9-19
06 3rd Damping Time
Coefficient
The function is the same as 02
hex.
P. 9-20
07 4th Frequency
The function is the same as 01
hex.
P. 9-20
08 4th Damping Time
Coefficient
The function is the same as 02
hex.
P. 9-20
3014
–
Damping Filter 2 Sets the damping filter 2. P. 9-20
01 1st Frequency Sets the damping frequency for the damping filter. P. 9-20
02 1st Damping Time
Coefficient
Sets the trade-off with torque required for the vibration sup-
pression time and damping.
Setting a small value shortens the time to suppress the vibra-
tion, however it is highly possible that torque saturation
occurs.
P. 9-20
03 2nd Frequency
The function is the same as 01
hex.
P. 9-21
04 2nd Damping Time
Coefficient
The function is the same as 02
hex.
P. 9-21
05 3rd Frequency
The function is the same as 01
hex.
P. 9-21
06 3rd Damping Time
Coefficient
The function is the same as 02
hex.
P. 9-21
07 4th Frequency
The function is the same as 01
hex.
P. 9-21
08 4th Damping Time
Coefficient
The function is the same as 02
hex.
P. 9-21
Item Conditions that interfere with the effect of damping control
Load condition • If forces other than position commands, such as external forces, cause vibration
• If the damping frequency is outside the range of 0.5 to 300 Hz
• If the ratio of the resonance frequency to anti-resonance frequency is large
Index
(hex)
Subindex
(hex)
Name Description
Refer-
ence

 Loading...
Loading...

