12 Troubleshooting
12 - 24
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
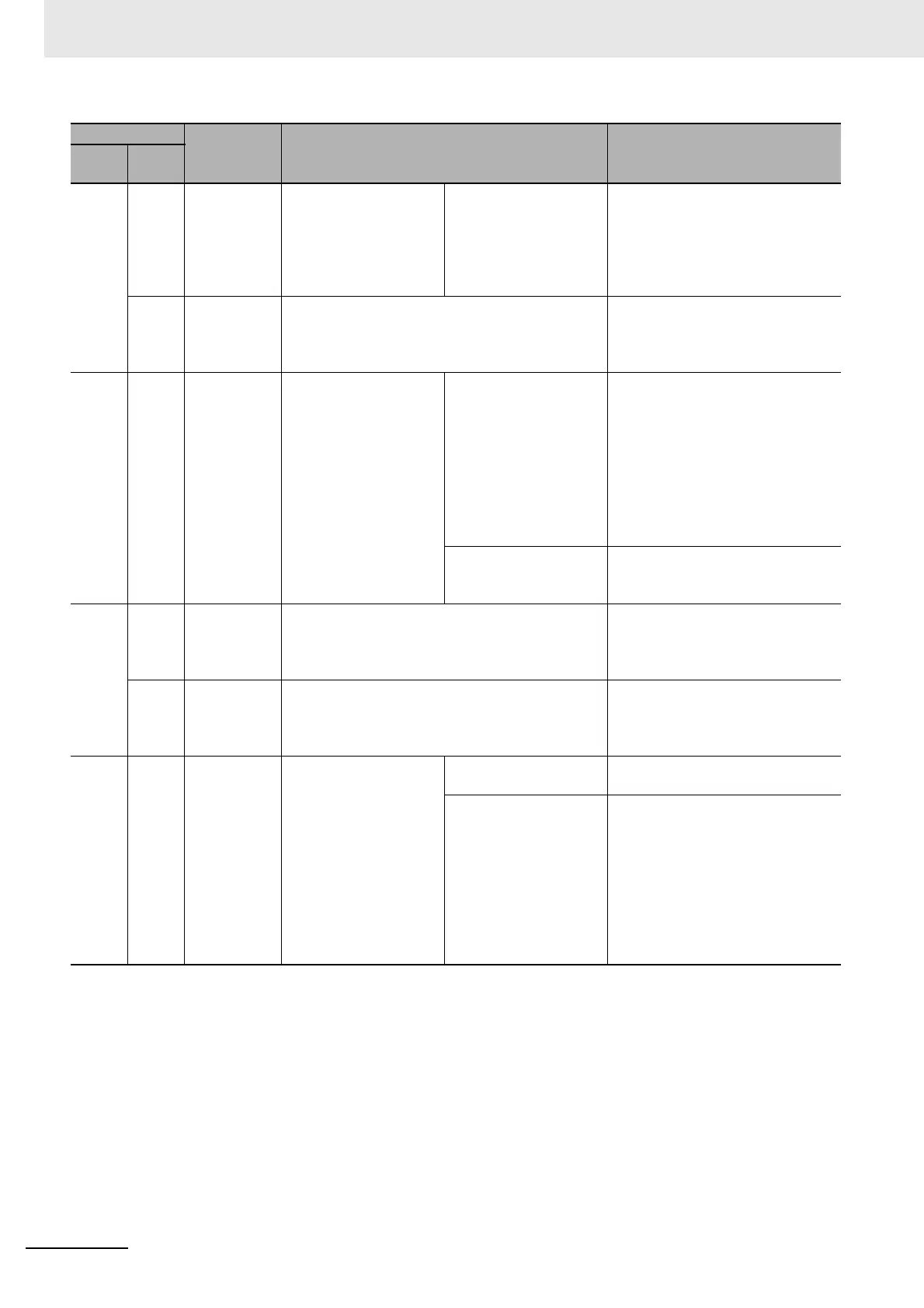
28 00 Pulse Output
Overspeed
Error
The speed, which
exceeded the fre-
quency that could be
output by the Encoder
Dividing Pulse Output
function, was detected.
The dividing ratio setting
is inappropriate for the
actual usage condition.
Correct the setting of Encoder
Dividing Pulse Output - Dividing
Denominator and Dividing Numera-
tor.
01 Pulse Output
Setting Error
The dividing numerator exceeded the dividing
denominator when the Encoder Dividing Pulse
Output - Dividing Denominator was set to a value
other than 0.
Correct the setting of Encoder
Dividing Pulse Output - Dividing
Denominator and Dividing Numera-
tor.
29 03 Following
Error Counter
Overflow
The following error
value exceeded the
range from
-2,147,483,648 to
2,147,483,647.
The motor operation
does not follow the com-
mand.
Identify and remove a cause that
limits the motor operation.
During the acceleration/decelera-
tion, the command may not be fol-
lowed depending on operation
patterns. In that case, change the
operation pattern by increasing the
acceleration/deceleration time or
the like.
The motor is rotated or
limited on the operation
by external forces.
Take countermeasures so that the
motor is not subjected to external
forces.
33 00 General Input
Allocation
Duplicate
Error
More than one function input is allocated to one
general input.
Correct the duplicate general input
allocation.
09 General Out-
put Alloca-
tion Duplicate
Error
More than one function output is allocated to one
general output.
Correct the duplicate general output
allocation.
34 01 Software
Limit
Exceeded
The Position actual
value detected the posi-
tion that exceeded the
value set in the Soft-
ware Position Limit, and
stopped the operation
according to the user
setting.
Incorrect setting of Soft-
ware Position Limit
Correct the setting of Software
Position Limit.
When the Software
Position Limit - Stop
Selection was set to a
Stop according to the
setting of Fault reaction
option code, the position
exceeded the value set
in the Software Position
Limit.
Set the command value to be within
the range of Software Position
Limit.
Error No.
Name Cause Measures
Main
(hex)
Sub
(hex)

 Loading...
Loading...

