12 - 33
12 Troubleshooting
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
12-5 Troubleshooting
12
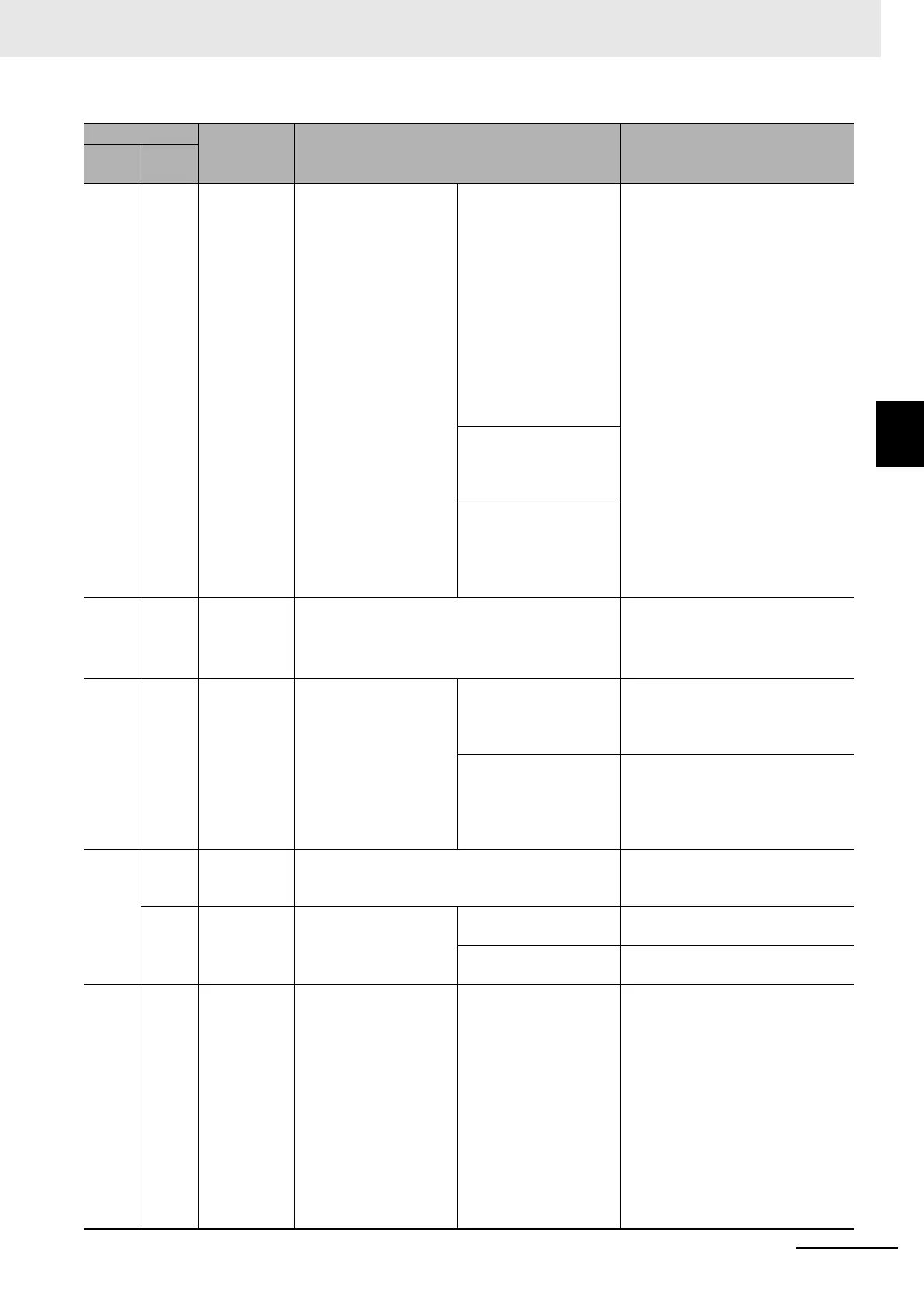
12-5-1 Troubleshooting Using Error Displays
91 01 Command
Error
A mistake was made in
using a command.
When bit 9 (Remote) of
the Statusword was set
to 1 (remote), and the
Servo Drive was in
Operation enabled state
(Servo ON), the Servo
Drive received a com-
mand to change the
communications state
from Operational to
another state (Init,
Pre-Operational, or
Safe-Operational).
Check the Servo Drive specifica-
tions and use the command cor-
rectly.
A mode of operation
other than the hm mode
was set during the hom-
ing operation.
Modes of operation was
set to pp, pv or hm
mode when the commu-
nications period was set
to shorter than 250 μs.
93 00 Electronic
Gear Setting
Error
The electronic gear ratio exceeded the allowable
range.
You can set the electronic gear ratio to the range
from 1/2,000 to 2,000 times.
Correct the electronic gear ratio to
the range from 1/2,000 to 2,000
times.
94 00 Function
Setting Error
The function that was
set does not support the
communications period.
The electronic gear ratio
was not 1:1 when the
communications period
was set to 125 μs.
Correct the electronic gear ratio to
1:1, or set the communications
period to longer than 125 µs.
The Backlash Compen-
sation was enabled
when the communica-
tions period was set to
125 μs.
Disable the Backlash
Compensation, or set the
communications period to longer
than 125 μs.
95 01 Motor
Non-confor-
mity
The Servo Drive and motor combination is not cor-
rect.
Replace the motor with one that
matches the Servo Drive.
05 Motor
Replace-
ment
Detected
The connected motor is
different from the motor
that was connected the
last time.
The motor was
replaced.
Perform the Motor Setup and Abso-
lute Encoder Setup.
The Servo Drive was
replaced.
Perform the Motor Setup.
97 00 Brake Inter-
lock Error
The Brake Interlock
Output (BKIR) was out-
put by the Timeout at
Servo OFF.
The Brake Interlock
Output (BKIR) was out-
put because the motor
rotation speed did not
decrease to or less than
the speed set in the
Threshold Speed at
Servo OFF within the
time set in the Timeout
at Servo OFF when
Servo OFF was per-
formed during the motor
operation.
Increase the set value of the Time-
out at Servo OFF according to
actual operation conditions.
Error No.
Name Cause Measures
Main
(hex)
Sub
(hex)

 Loading...
Loading...

