Appendices
A - 44
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
Description of Set Values
Precautions for Correct Use
• When the error is cleared, a process which makes the command position follow the present
position comes into effect. To operate in Cyclic synchronous position mode (csp) after the
Servo turns ON, reset the command coordinates in the host controller and then execute the
operation. The Servomotor may move suddenly.
• If an error occurs while the main power supply is OFF, operation will follow Fault reaction
option code (605E hex).
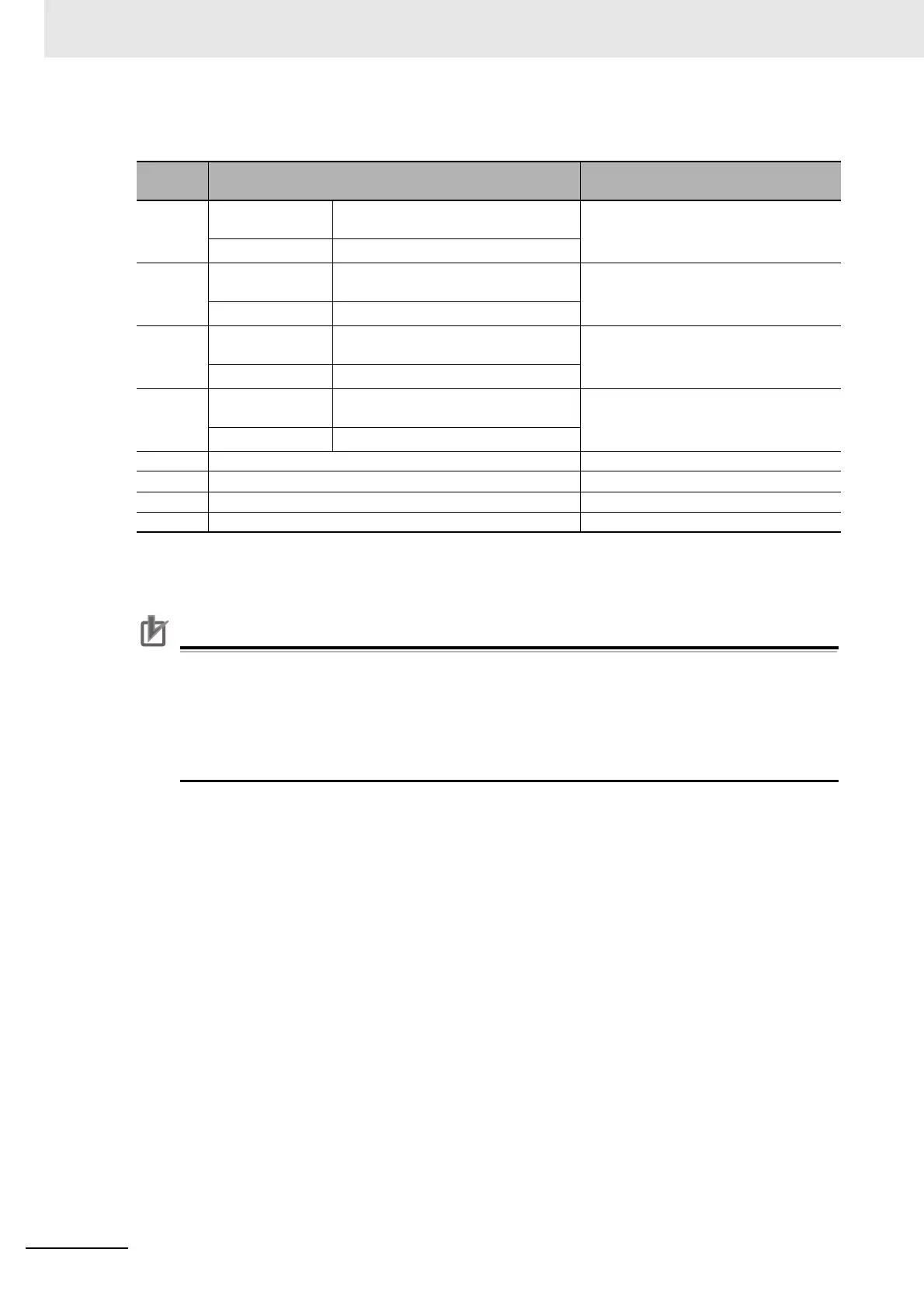
Set
value
Deceleration method Operation after stopping
-7
Operation A
*1
*1. The Servomotor stops according to the setting of Operation B while in an STO status that or when the P-N
Voltage drops to the specified value or lower. In other cases, the Servomotor decelerates to stop according to
the setting of Operation A.
Deceleration stop (The deceleration
stop torque is used.)
Free
Operation B
*1
Free-run
-6
Operation A
*1
Deceleration stop (The deceleration
stop torque is used.)
Free
Operation B
*1
Dynamic brake operation
-5
Operation A
*1
Deceleration stop (The deceleration
stop torque is used.)
Dynamic brake operation
Operation B
*1
Free-run
-4
Operation A
*1
Deceleration stop (The deceleration
stop torque is used.)
Dynamic brake operation
Operation B
*1
Dynamic brake operation
-3 Dynamic brake operation Free
-2 Free-run Dynamic brake operation
-1 Dynamic brake operation Dynamic brake operation
0 Free-run Free

 Loading...
Loading...

