RTC
®
5 PC Interface Board
Rev. 1.9 e
9 Programming Peripheral Interfaces
210
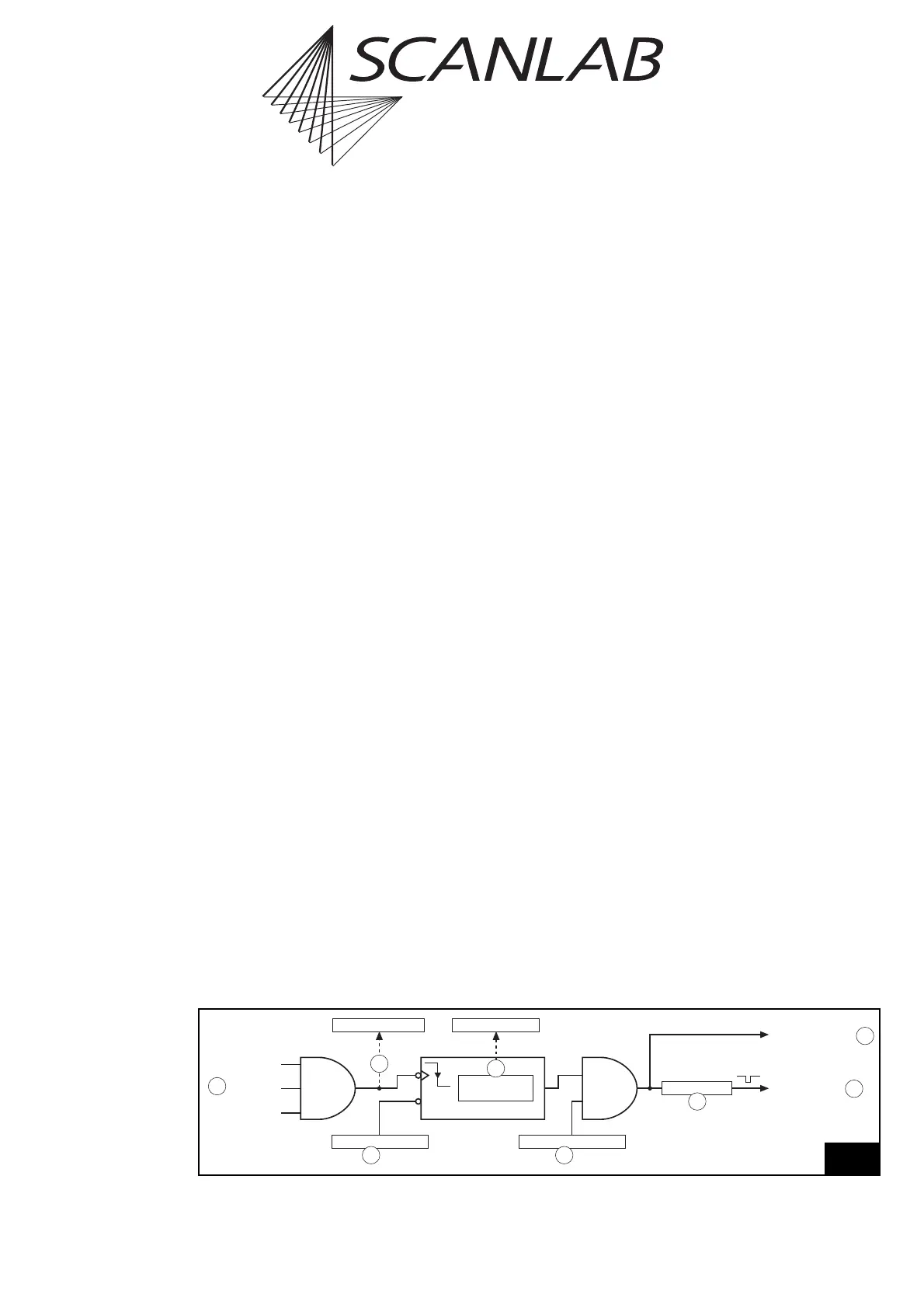
External List Start
Via a signal at the inputs /START, /START2 or /Slave-
START, or via the commands simulate_ext_start or
simulate_ext_start_ctrl, an external list start can be
initiated (see (1), (5) and (7) in figure 58). This will
start execution at the beginning of “List 1”. But the
commands set_extstartpos or set_extstartpos_list
also allow pre-selection of another absolute start
address. A list will only be started if neither the BUSY
status (as during list execution) nor the INTERNAL-
BUSY status (as e.g. with goto_xy) nor the PAUSED
status (after pause_list, stop_list or set_wait) is set
at the moment.
Before the /START, /START2 or /Slave-START inputs (1)
can be used, they must be enabled with the
command set_control_mode (3).
The /START input is accessible via the 15-pin D-SUB
LASER connector (see page 46), the /START2 input at
the MARKING ON THE FLY connector (see page 51).
Both signal inputs are internally connected to +3.3 V
via pull-up resistors (4.7 k). Both inputs are TTL
active-LOW and edge sensitive (HIGH to LOW level
transition). A list start is triggered – after activation by
set_control_mode – as soon as one of the three
input signals changes from HIGH to LOW (i.e. to 0 V
or ground).
If the RTC
®
5 board is coupled via the MASTER or
SLAVE connector to another board, then external list
starts will be passed on from the master to the slave:
a start signal issued via the master board’s MASTER
output (8) is received at the slave board’s SLAVE input
(1), triggers a list start at the slave board and is again
issued via the MASTER output (8) of the slave board.
List starts triggered by execute_list or
execute_at_pointer are not passed on from Master
to slave, but external list starts triggered by
simulate_ext_start or simulate_ext_start_ctrl are
passed on (also see chapter 6.6.3 "Master/Slave Oper-
ation", page 84).
The command get_startstop_info queries the
current start status (i.e. whether one of the inputs is
currently set to LOW) (2) and whether a list has
successfully started.
The command bounce_supp enables debouncing of
start signals received at the /START, /START2 or /Slave-
START inputs (4). Start signals occurring within the
defined debouncing time after a successful start
signal are thereby suppressed. The
get_startstop_info command queries whether a
start signal was suppressed (4).
simulate_ext_start_ctrl can be used to start via
control command a synchronous list start of
master/slave-synchronized boards.
The list command simulate_ext_start can be used,
for instance, to trigger further list starts at defined
intervals after the successful one-time external start
of a list (see below).
External List Start with Track Delay
For many applications (e.g. if a workpiece must be
initially transported from the light barrier to the scan
system), the list start must be delayed with reference
to the triggering start signal.
For this purpose, the commands
set_ext_start_delay, set_ext_start_delay_list or
simulate_ext_start allow configuring a track delay
(see (6) in figure 58) that postpones execution of a
list start relative to the triggering input signal or
corresponding command. The track delay is specified
in counting units of an internal encoder (encoder-
counter) that itself can be triggered by an external or
simulated encoder signal (see page 215).
External list starts triggered by an external start signal
or by simulate_ext_start or simulate_ext_start_ctrl
that don’t execute immediately because of the track
delay setting are held in a queue that can accom-
modate up to 8 starts (each start trigger will be auto-
/START
/START2
/Slave-START
ext-start enable
ext-start status
simulate ext-start
ext-start error
1
2
5
3
/Master-START
/ext list start
8
7
AND AND
bounce
suppression
4
track delay
6
External list start (see text for description)