1.4.1.5 Failsafe Behavior
In case the power on the DC bus exceeds Peak Power or shunts reach their temperature limit, the shunt will be
deactivated in order to prevent the resistors from burning. In that case, the DC bus will behave just like it
would without any shunt installed. Thus, the DC bus voltage will keep growing until the Drive’s overvoltage
protection triggers.
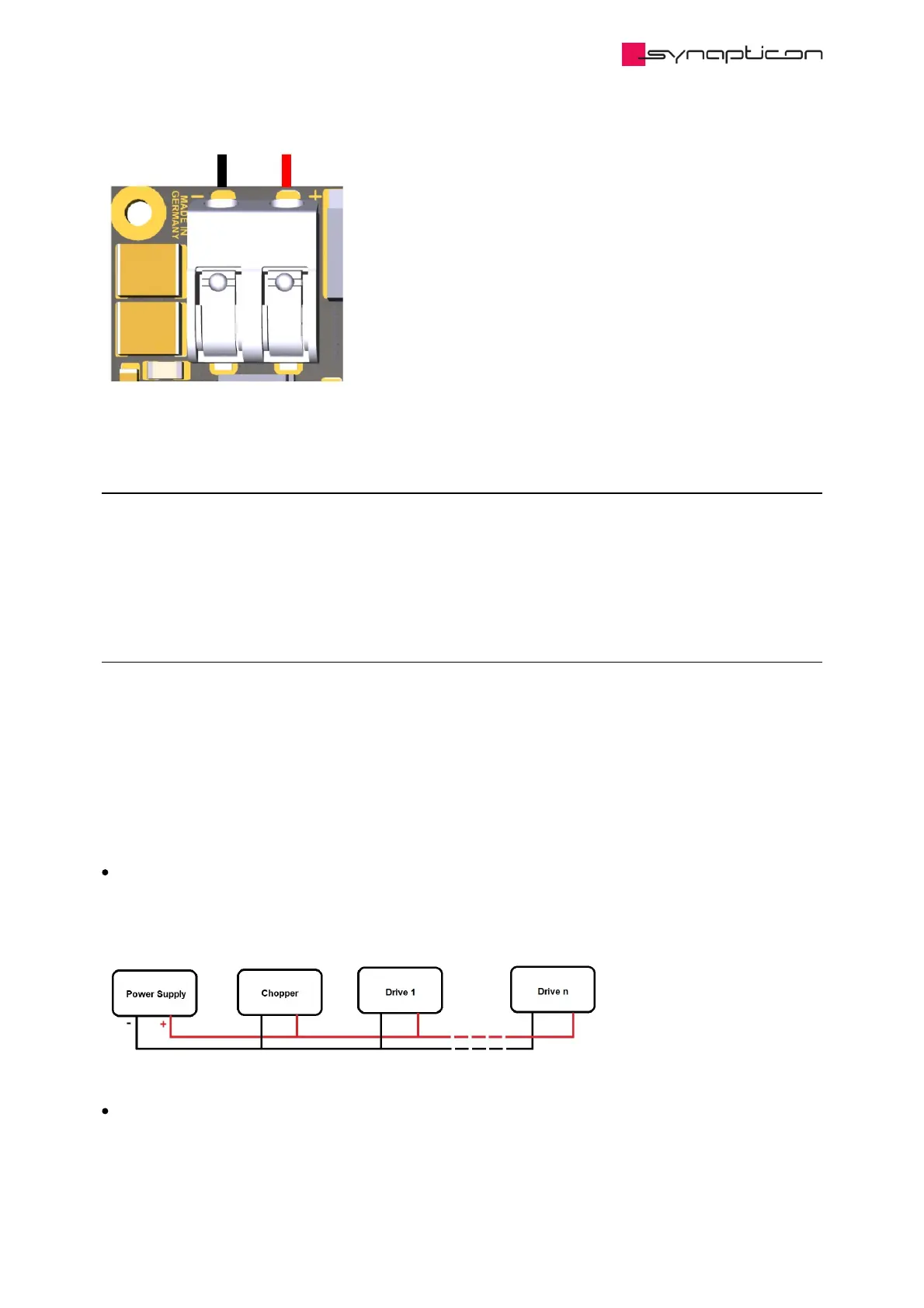
1.4.1.6 Multi-board option
Several SOMANET Chopper 500 boards can be used on the same DC link, by just connecting them in parallel.
This way, their peak power and average power will add up.
The required overall shunt power in a robotic system depends on many factors, including the robot’s inertia,
payload, number of axes, size and type of motors, trajectory, controller settings, braking and quick stop
strategies etc. There is no universal rule of thumb indicating how many SOMANET Chopper 500 boards are
required for a certain number of motors. Developers should compute the regenerative powers and energies in
their robot’s respective load cycle or measure these values in experiments.
Some practical guidelines to begin with:
If decelerations and loads are moderate, one Chopper 500 can cover the regenerated energy of several
Drives. In many real-world applications, this is already enough, so one Chopper 500 per robot is often
sufficient.
A setup combining one Chopper 500 with one drive allows for very demanding applications. However for
test bench experiments or extreme trajectories including very sharp braking beginning abruptly at
maximum speed, one Drive 1000 can even exceed the capabilities of one Chopper 500.
 Loading...
Loading...

