4.2.1.2.2 Control Basics
Tuning of the gain scheduling controller is the same as for cascaded controller but it has to be done two times.
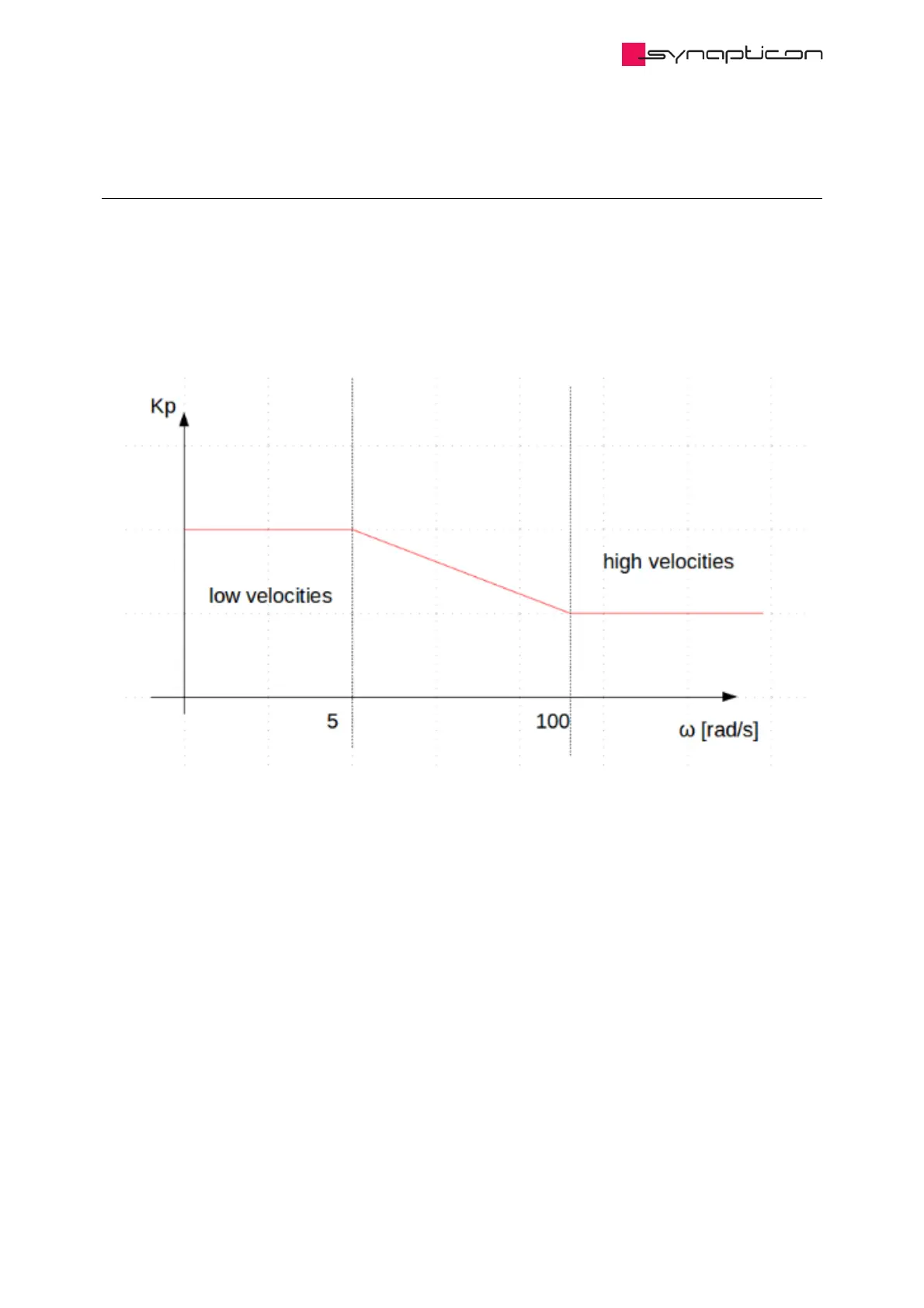
One tuning should be done for the low velocity dynamics and the other one for high velocity dynamics. It is
expected that the gains for lower velocities (axis is close to reference position) will be higher (controller reacts
faster on overshoot and steady state error) then the gains for higher velocities (system is far away from the
reference position). Usually the schedling of gains depending on axis velocity looks like on the picture shown
in Fig. 2.
Fig. 2: Scheduling of gains depending on
velocity
Integral limit of the velocity controller should be set to the maximum torque of your torque actuator (in mNm)
and integral limit of the position controller should be set to the maximum velocity of your system (in rpm).
 Loading...
Loading...

