3.1.9.1.50 0x2011 Velocity controller
3.1.9.1.50.1 Velocity PID Tuning (objects 2011:1...2011:4)
IMPORTANT: These values are only used in velocity control mode (not in cascaded position control)
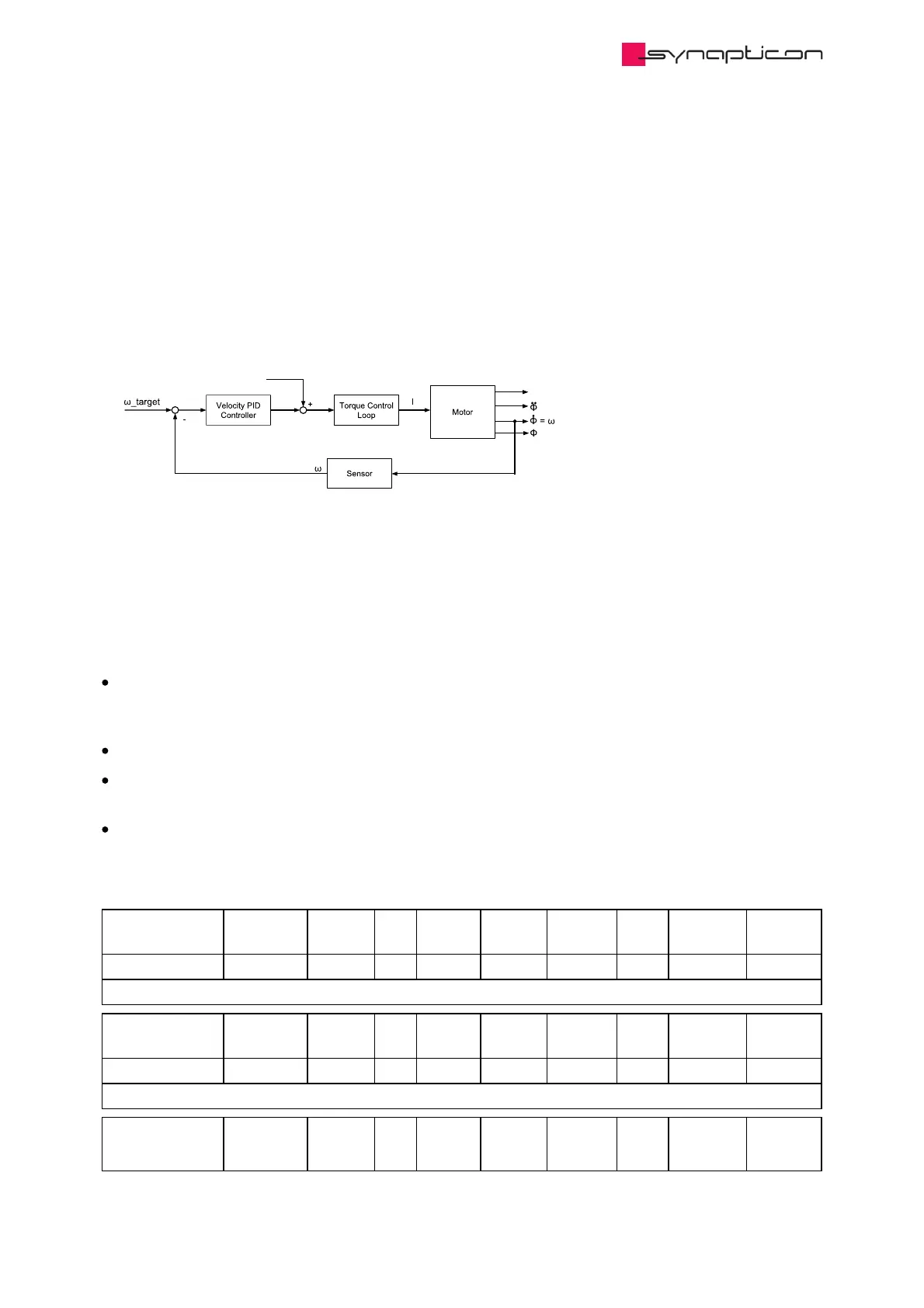
3.1.9.1.50.1.1 Controller Structure
3.1.9.1.50.1.2 PID Parameter Range
The constants K_p, K_i, and K_d should be between 0 and 10 with the precision of 6-digit floating point. To find
the proper values of PID constants of velocity controller the following steps are recommended:
3.1.9.1.50.1.3 Recommended Tuning Steps
Step 1. Check if all constants K_p, K_i, and K_d are set to 0. After that activate the velocity controller. By
default, the integral limit of velocity controller should be set to the maximum torque of selected motor in
[mNm].
Step 2. Set the reference velocity to 50% of rated motor velocity [rpm].
Step 3. Increase K_p until the measured speed is around 70% of the reference speed. As a suggestion start
with K_p equal to 0.1, and in each step increase K_p with a factor of 2.
Step 4. From this step forth, step response of the system should be checked. Increase K_i step by step to
increase the speed of velocity controller (as a suggestion start with K_i equal to 0.01 and in each step
increase it by a factor of 2). At this point, the parameters K_p and K_i of the velocity controller are tuned.
The parameter K_d of the velocity controller can be kept at its default value (0).
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Controller Kp 0x2011:1 REAL 32 0 65535 0 readwrite
The P-gain of the PID Velocity Control Loop [mNm/rpm].
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Controller Ki 0x2011:2 REAL 32 0 65535 0 readwrite
The I-gain of the PID Velocity Control Loop [mNm/(rpm*s)]
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
 Loading...
Loading...

