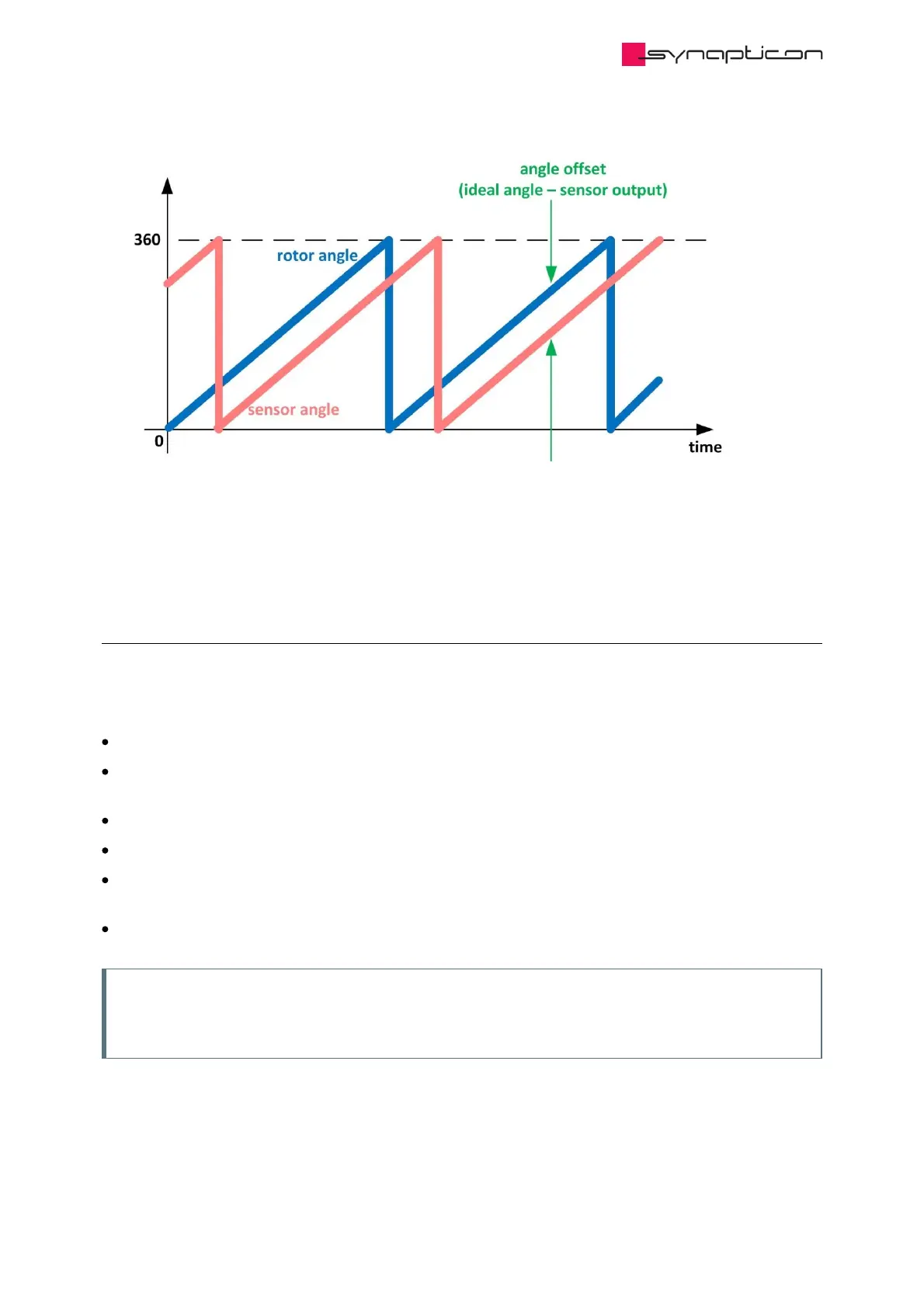
Fig. 3: In most of the cases, the provided sensor angle has a commutation angle
offset
3.1.3.5.3 Requirements
3.1.3.5.3.1 Load requirements
The active load of the system should be lower than motor rated torque
The position feedback sensor on the motor side should be configured properly and provide proper
feedback of the motor position
The motor should be configured correctly
The mechanical system should not block the motor
The brake should be configured correctly and work properly during the routine so that it doesn’t block the
system
The power supply used should be able to provide the voltage / current required by the routine
Note
If the requirements are not met, the Offset Detection routine fails and the detection result can be
wrong, leading to further failures.
 Loading...
Loading...

