3.1.8.3.10.3.2.2 Cons
Smoothing will prevent the actuator from following the commanded trajectory, which may be problematic
when part of a trajectory needs to be followed closely while other parts should be smoothed.
End effector precision may be poorly affected for robots with serial kinematics.
Note
The disadvantages above can be mitigated by slowing the trajectory in areas that need more precision.
3.1.8.3.10.3.3 Communication jitter mitigation
When no distributed clock is available, the clocks on the slave and master devices will drift, and this will cause
a cycle to periodically either miss a command, or complete before the command arrives to the controller. This
will effectively either double the input command or see no change to the input command. This creates a
discontinuity that is twice the magnitude of the normal command steps.
Set the filter to an order similar to what should be chosen for input interpolation.
3.1.8.3.10.3.3.1 Pros
While distributed clock and interpolated input will yield the best performance, using the FIR filter here will
also smooth the discontinuities caused by communication jitter.
The filter order can be boosted for additional smoothing if the communication delays are severe.
3.1.8.3.10.3.3.2 Cons
See Side Effects
The trajectory is not guaranteed to match the input, since large steps will still cause “bumps” in the
command. These bumps will be much less aggressive, but they won’t be entirely removed from the input.
Extra smoothing will always yield extra deviation from the original command.
3.1.8.3.10.4 Detailed Description
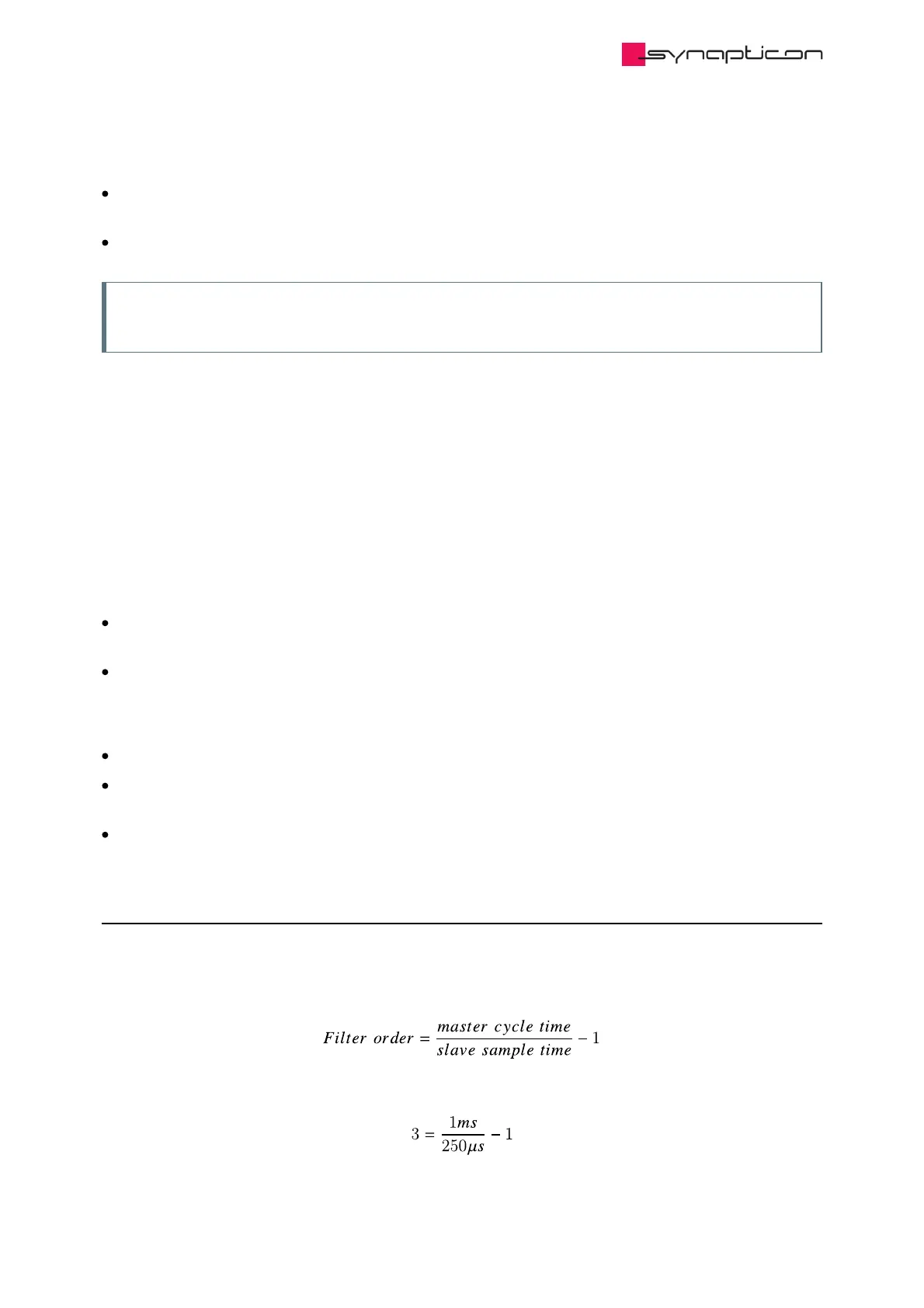
A boxcar filter with rectangular gains is implemented, equivalent to a moving average filter (MAF). A moving
average filter is equal to a linear interpolation if the filter order is equal to ratio between master and slave
sample time - 1.
An example of the filter order for a master with 1 ms cycle time and 250 µs cycle time SOMANET slave:
 Loading...
Loading...

