3.1.8.2.6 Selecting and switching the Modes
Selection of these modes is done by setting the object 0x6060 to the corresponding value as defined in the CiA
402 standard.
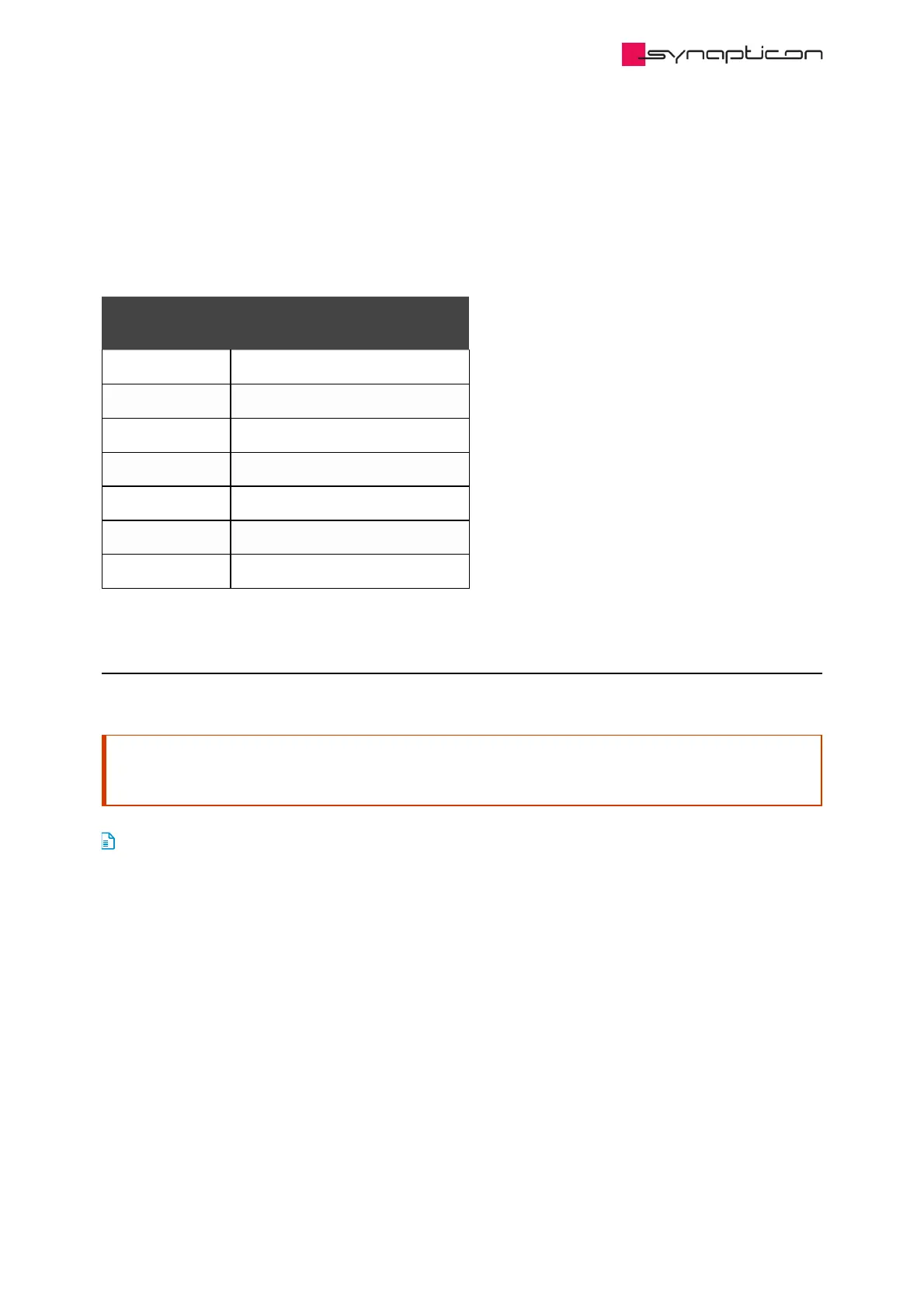
The modes are called by setting the object 0x6060 as follows:
Value for
0x6060
Control Mode
+1 Profile position mode
+3 Profile velocity mode
+4 Torque profile mode
+6 Homing mode
+8 Cyclic Syncronous Position Mode
+9 Cyclic Syncronous Velocity Mode
+10 Cyclic Syncronous Torque Mode
3.1.8.2.6.1 Dynamic Op-Mode switching
The modes can be switched while in state Operation enabled.
Attention
Ensure that all required PDO data is available for the mode you are switching to.
0x6060 Op Mode Use this object to select the desired Mode
 Loading...
Loading...

