2.4 Motion Control Tuning
Controller Tuning is an essential task in setting up a Motion Control system. It ensures that the motor behaves
exactly as you expect it. Our Auto-Tuning feature will provide good results for most applications but you can
still manually fine-tune your system.
Autotuning Overview of the Autotuning feature
System Identification This feature allows to generate a precise model of the mechanical system with
one click
Position Autotuning Automatically generates gain values for the cascaded position controller
Velocity Autotuning Automatically generates gain values for the velocity controller
Manual Tuning Description of steps required for manually tuning the controller gains
Manual Tuning of the current controller The generated torque is directly proportional to the current.
Manual Tuning of the velocity control loop Instructions for manually tuning the proportional and integral
gains of the velocity control loop if the drive should be operated in velocity control mode.
Manual Tuning of the position control loop Instructions for manually tuning the cascaded PID controller.
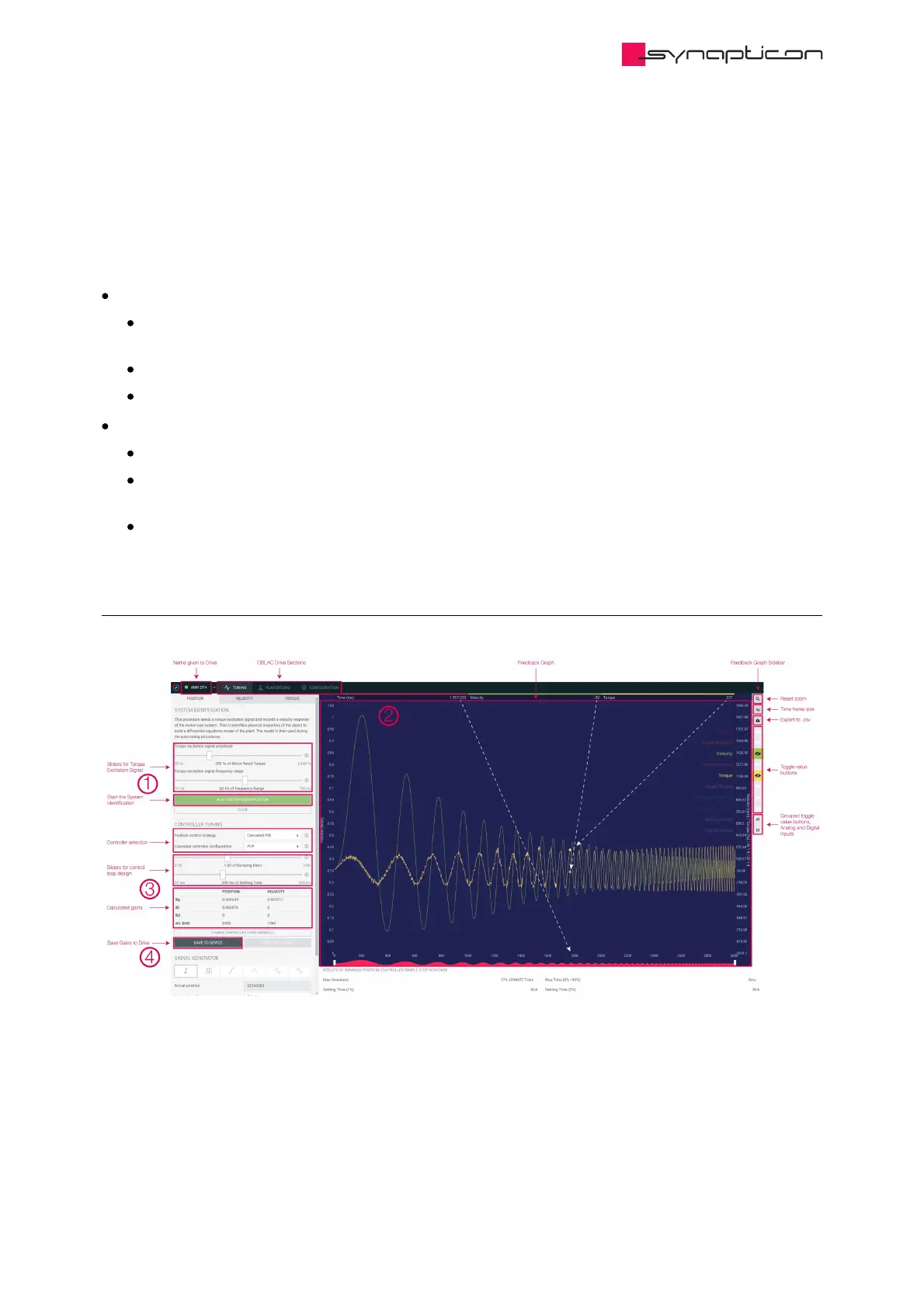
2.4.1 Overview of the Tools
1. Start tuning by identifying the mechanical properties with our System Identification feature
2. Use the feedback graph to determine the best values
3. Finetune the controller gains and design the optimal control structure
4. Save the values to the drives
 Loading...
Loading...

