3.1.9.1.52.2 Parameter Tuning Guide for Position Controller with simple PID Structure
(objects 2012:1...2012:4 only)
The Position Controller with Cascaded Structure is generally preferable over the simple PID controller. Apart
from academic purposes, there are few reasons to use the simple PID controller.
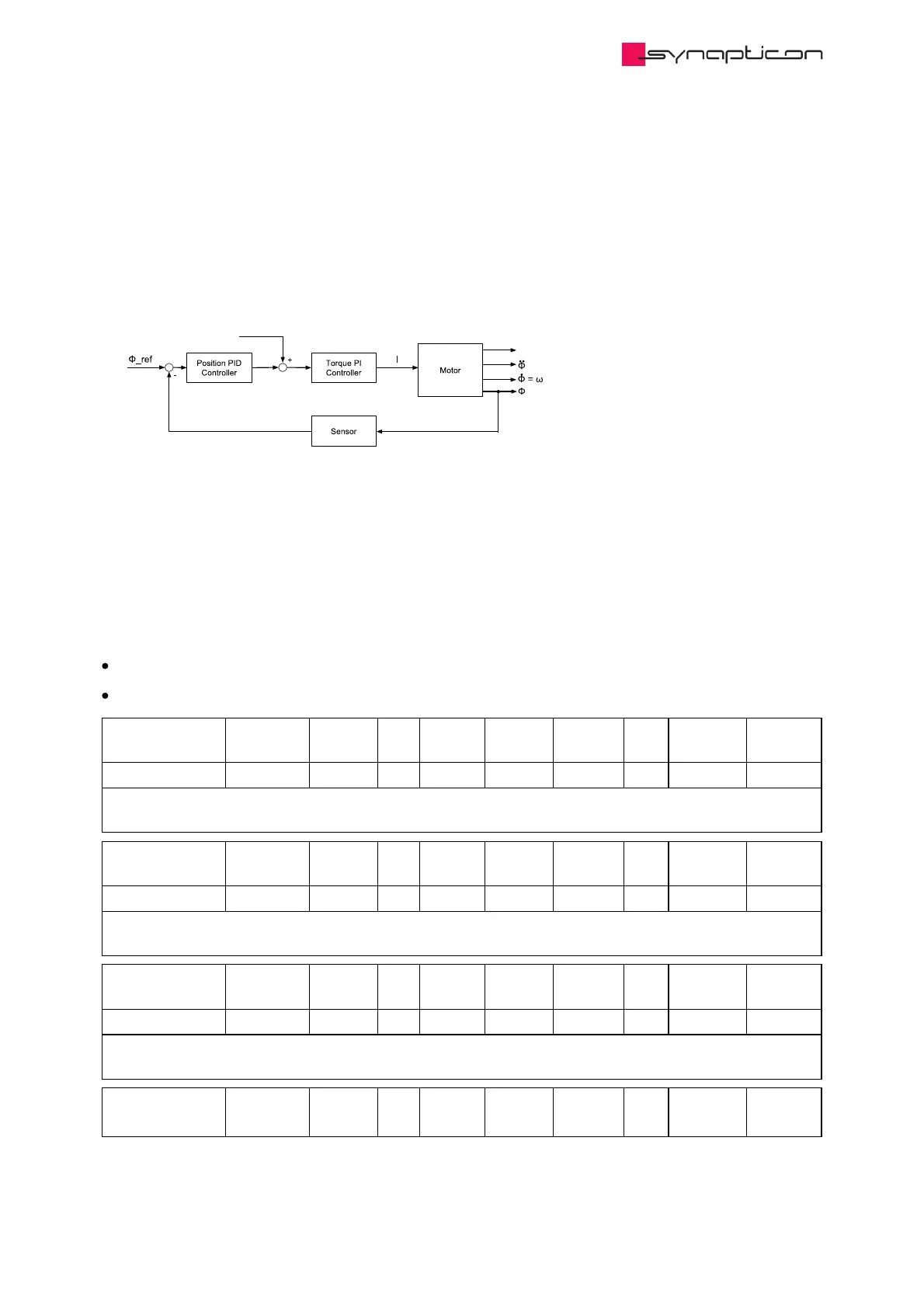
3.1.9.1.52.2.1 Control Structure
3.1.9.1.52.2.2 Tuning Concept for Simple PID Controller
To tune the position controller loop, we should start with the P part of its PID controller. Increase K_p_position
until the entire position control gets close to instability margin. At this state, you will feel a vibration (or
acoustic noise) which is because of a position control that has been sharpened too much. At this step, reduce
K_p_position to its 90% to increase the stability margin and remove the vibration/acoustic noise. Now increase
K_i to eliminate the steady state error. As a suggestion start with K_i equal to 0.01, and in each step, increase it
with a factor of 2. Increase K_i step by step until the following two conditions are met at the same time:
the steady-state error is eliminated in a short enough period of time
the overshoot is in its acceptable range
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Position loop Kp 0x2012:1 REAL 32 0 65535 0 readwrite
The P-gain of the PID Position Control Loop. The value is given in [rpm/inc] for the cascaded position
controller ([mNm/inc] for the simple PID position controller)
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Position loop Ki 0x2012:2 REAL 32 0 65535 0 readwrite
The I-gain of the PID Position Control Loop. The value is given in [rpm/(inc*s)] for the cascaded position
controller ([mNm/(inc*s)] for the simple PID position controller)
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Position loop Kd 0x2012:3 REAL 32 0 65535 0 readwrite
The D-gain of the Position Control Loop [rpm*s/(inc)] for the cascaded position controller ([mNm*s/(inc)] for
the simple PID position controller)
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
 Loading...
Loading...

