3.1.8.3.9 Filtering
3.1.8.3.9.1 Overview
Attention
Since Firmware 5.0 only 1st order Position and Velocity Feedback filters are supported.
A digital filter removes unwanted components from the signal which passes through it.
This feature can be used for example as:
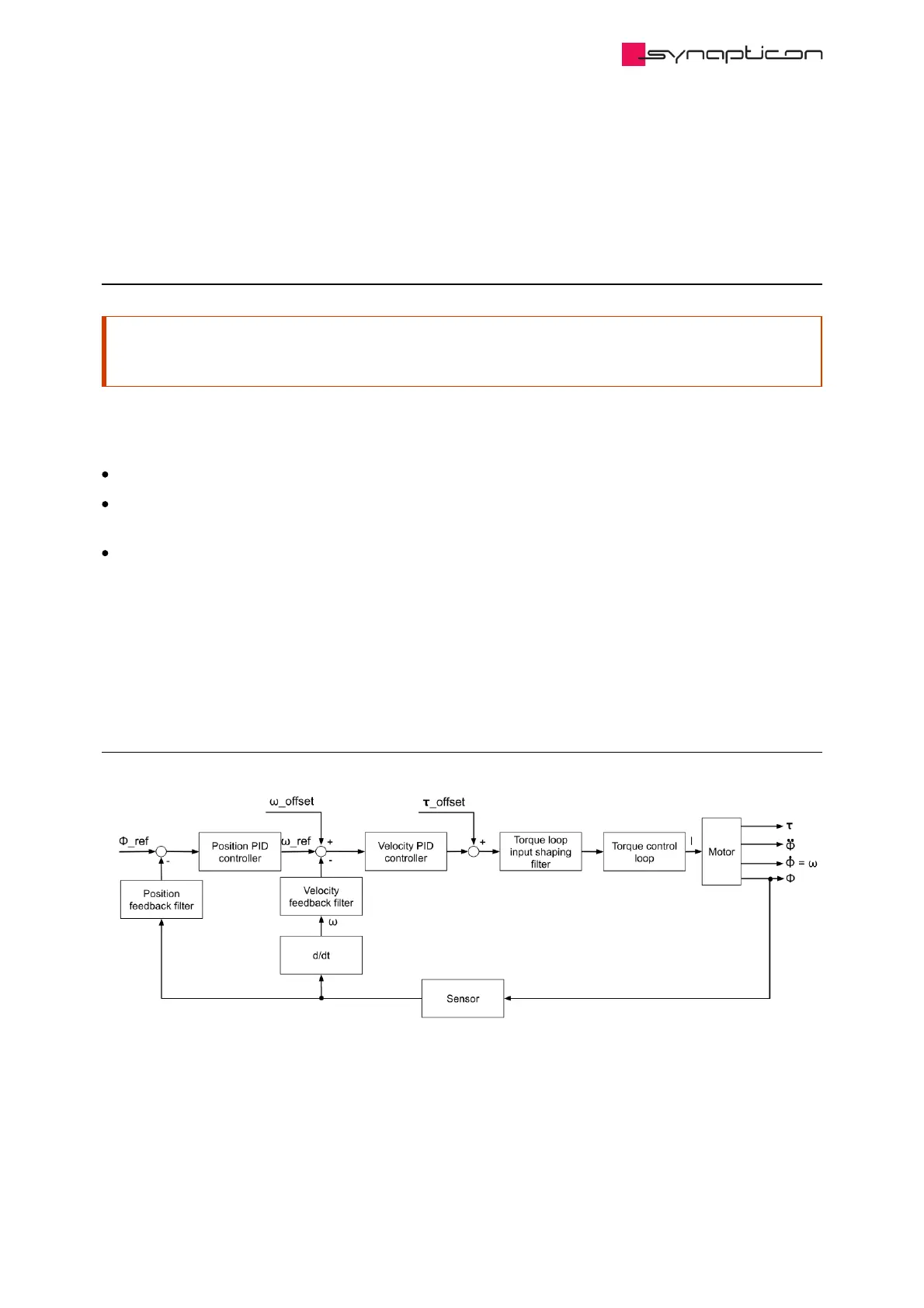
Position Feedback filter - Reduce encoder noise. A 1st order low-pass filter is supported.
Velocity feedback filter - Reduce noise and effects of encoder nonlinearity in the velocity signal. A 1st order
low-pass filter is supported.
Loop shaping filter - Suppress excitation of resonance frequencies in the output of the motion control loop
or in the input of the torque control loop. A 2nd order notch filter is supported.
Any signal can be decomposed into a sum of sine waves with different frequencies. Some of them might
negatively affect the control loops. It is possible to attenuate these unwanted frequencies by properly
configuring a corresponding filter.
Configurable filters are implemented for the signals that are considered the most important for motion
control.
General View
 Loading...
Loading...

