2.5.3 Rotate your motor at defined velocities
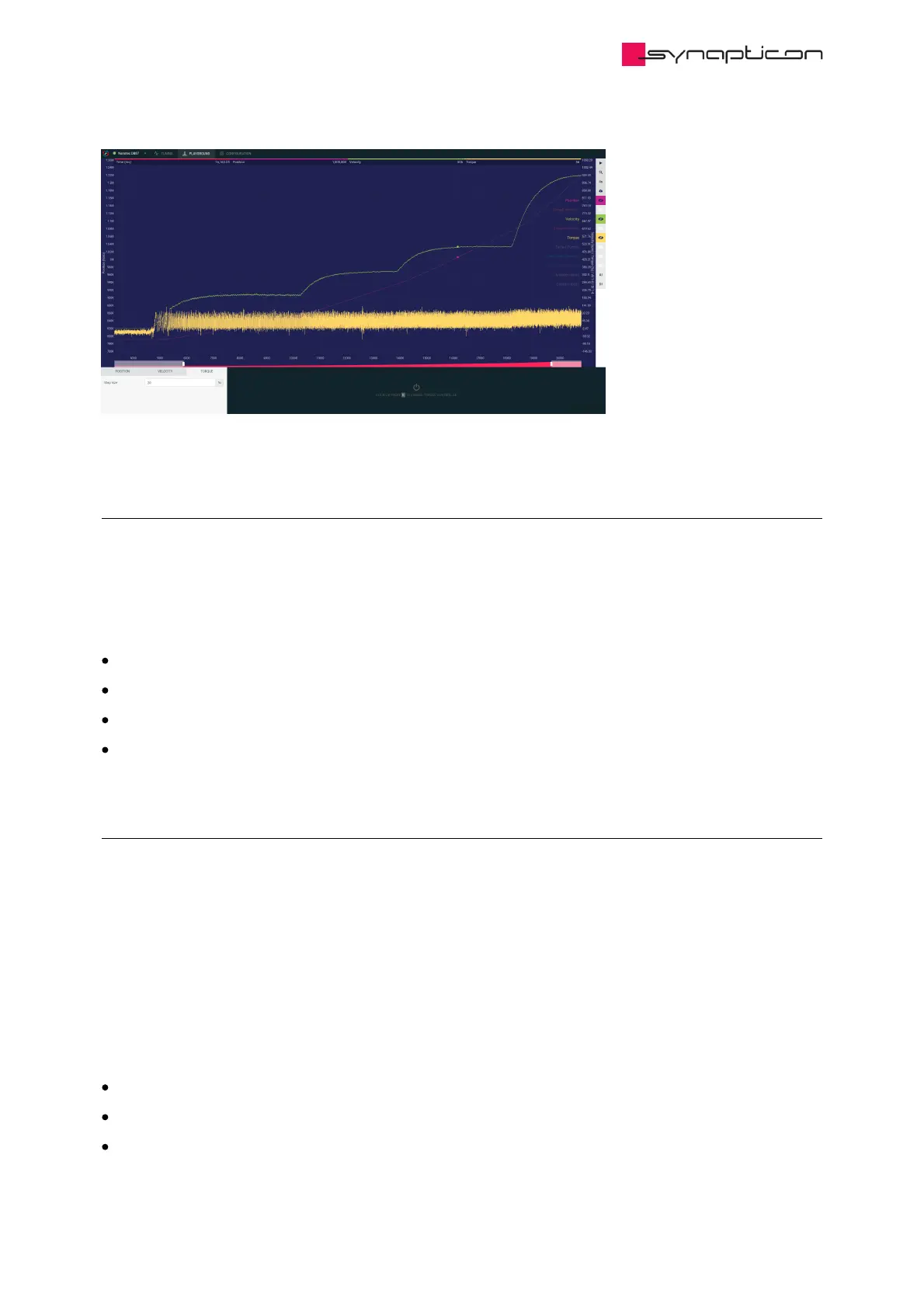
One of the next steps can be testing the velocity control mode. The Playground allows to set and alternate the
velocity setpoint. Before, the Velocity controller has to be tuned. Select the velocity increment size, enable the
velocity controller and try out different velocity setpoints. Position, torque and other signals can be observed if
needed.
You may also configure additional features such as:
Velocity feedback signal filtering
Cogging torque compensation
Velocity offset for Feed-forward control
Field weakening
2.5.4 Rotate your motor to defined positions
Common tasks in robotics involve moving a manipulator, vehicle or gripper to a predefined position. In order
to do so, your SOMANET servo drive comes with an internal position controller that can be configured and
adapted to your surrounding mechanical system automatically.
Enter a target position in the units of encoder increments (‘ticks’) and see how the motor moves there.
Depending on your encoder resolution, quite large numbers are necessary to create visible motions. For
example, with a 16-bit encoder 65,536 ticks represent one motor shaft revolution. If you even have a reducer
(gearbox) attached to your motor shaft, you may have to change the position setpoint by several 100,000 ticks
to create visible motion. However, we recommend to start with small steps and then slowly increase them.
Finally, you can check the performance of your position control loop by using one of the position setpoint test
functions available in OBLAC Drives. Depending on what suits your application best, you can choose from:
step
sinusoidal
trapezoidal
 Loading...
Loading...

