4.2.1.2 Parameter Tuning Guide for Position
Controller with Gain Scheduling
4.2.1.2.1 Introduction
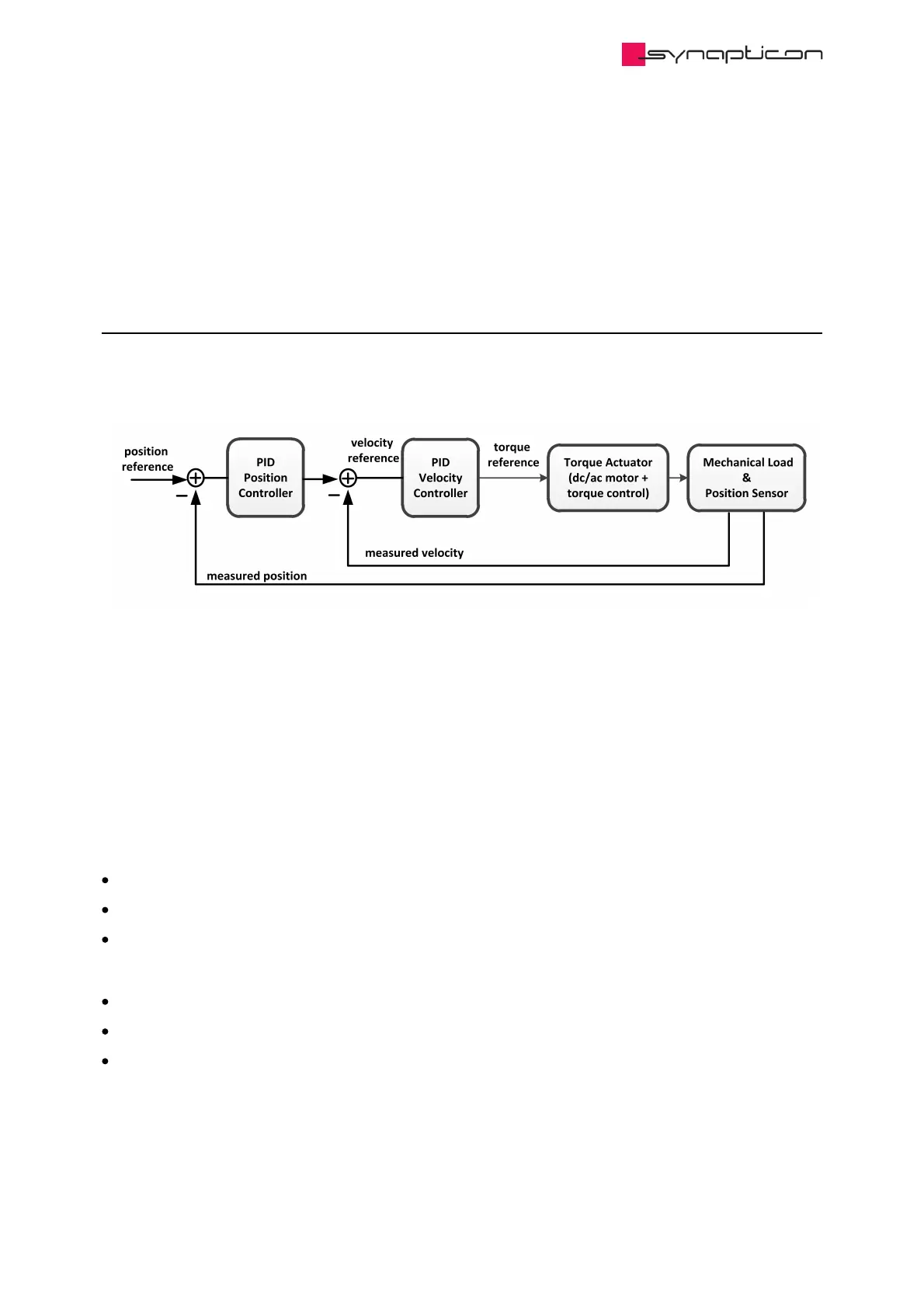
In this document, the steps of tuning gain scheduling position controller are explained. The structure of gain
scheduling controller is the same as for a basic cascaded controller shown in Fig. 1.
Fig. 1: Cascaded position control
structure
Gain scheduling controller changes gains based on measured velocity of the axis. Basically it uses two sets of
gains, one set is used when the system moves with low velocity and the other set is used for high velocities.
User sets two parameters for low and high velocity area, i.e. low velocities are bounded with upper limit (low
velocity limit) and high velocities are bounded with lower limit (high velocity limit). Between limits gains are
changed linearly. By seting the velocity limits user can control how often the gains will change, i.e. user can
adjust behaviour of controller depending on the dynamics of the system.
Measuring units of gains of position controller are:
k [rpm/ticks]
k [rpm/ticks*s]
k [rpm*s/ticks]
Measuring units of gains of velocity controller are:
k [mNm/rpm]
k [mNm/rpm*s]
k [mNm*s/rpm]
P
I
D
P
I
D
 Loading...
Loading...

