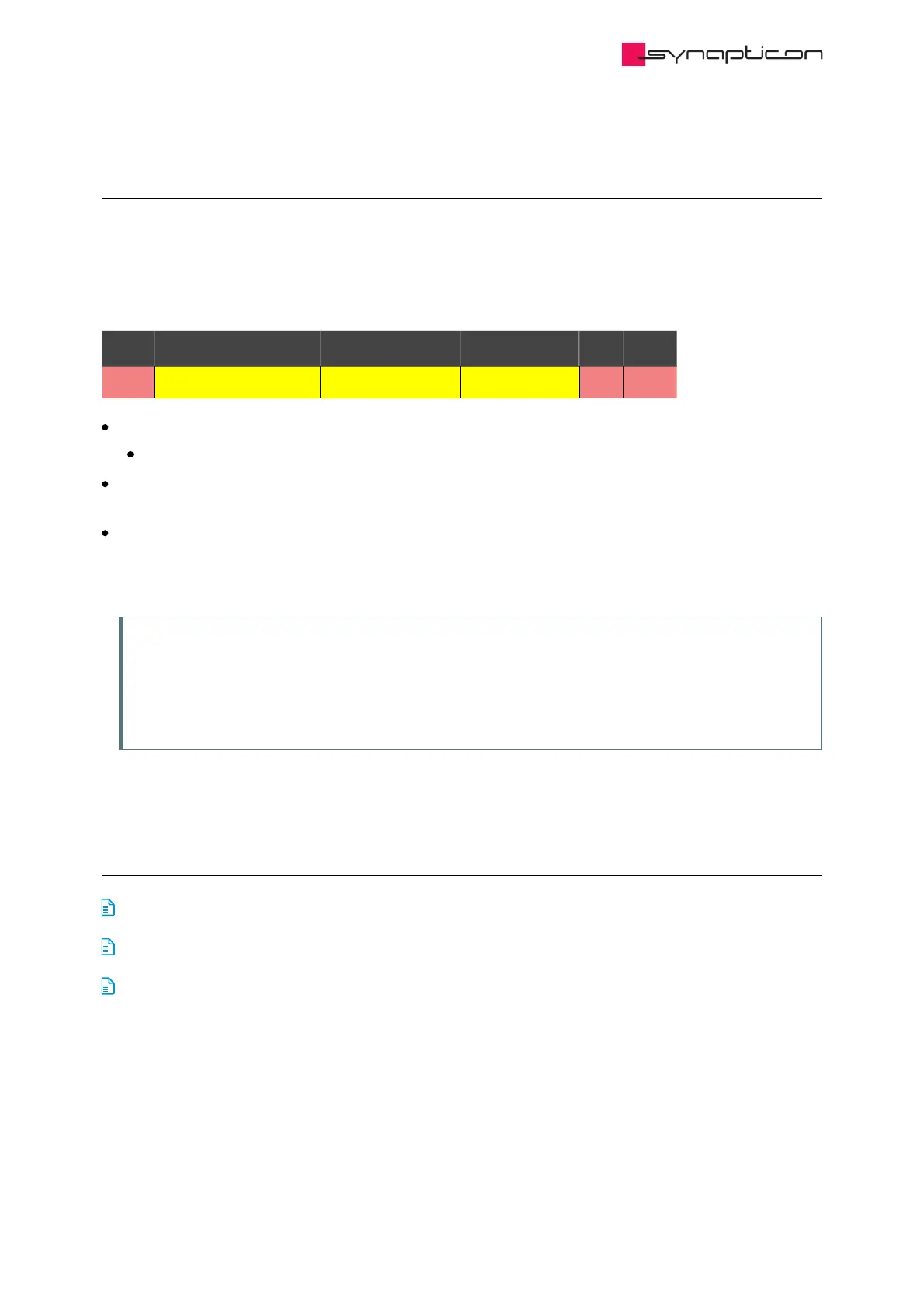
3.1.8.2.1.1.1 Operation Mode dependent Bits of the Statusword
This mode uses some bits of the statusword for mode specific purposes which are indicated in yellow. The
figure shows the structure of the statusword. For the general structure and usage, please refer to our
Application note on Status- and Controlword.
The mode specific bits of the statusword can be used to monitor the performance of the operation. For further
information please refer to the section on Control Supervision.
Internal limit active:
Max torque 0x6072 limits Target torque 0x6071 and Torque offset 0x60B2.
Target reached: The bit is set if the actual torque stays in the window of target torque ± torque window
value for a duration of torque window time.
Target torque ignored: This bit is set if Target torque 0x6071 is equal to Torque demand 0x6074.
It means that the user command is passed directly through as an input of the torque controller. However, if
Target torque is limited by Max torque, the limited value will be used as an input of the torque controller
and the bit will be cleared.
Note
0 = Target torque ignored
1 = Target torque shall be used as input
3.1.8.2.1.1.2 Parameters related to Cyclic Synchronous Torque
Control
0x2010 Torque Controller Values Kp, Ki and Kd for Torque Controller
0x6071 Target torque Use this object to directly select a Target torque
60B2 Torque Offset This object provides the offset for the torque value.
 Loading...
Loading...

