After the home position is found, the position controller stays active, holding the motor at that position (except
for method 35/37).
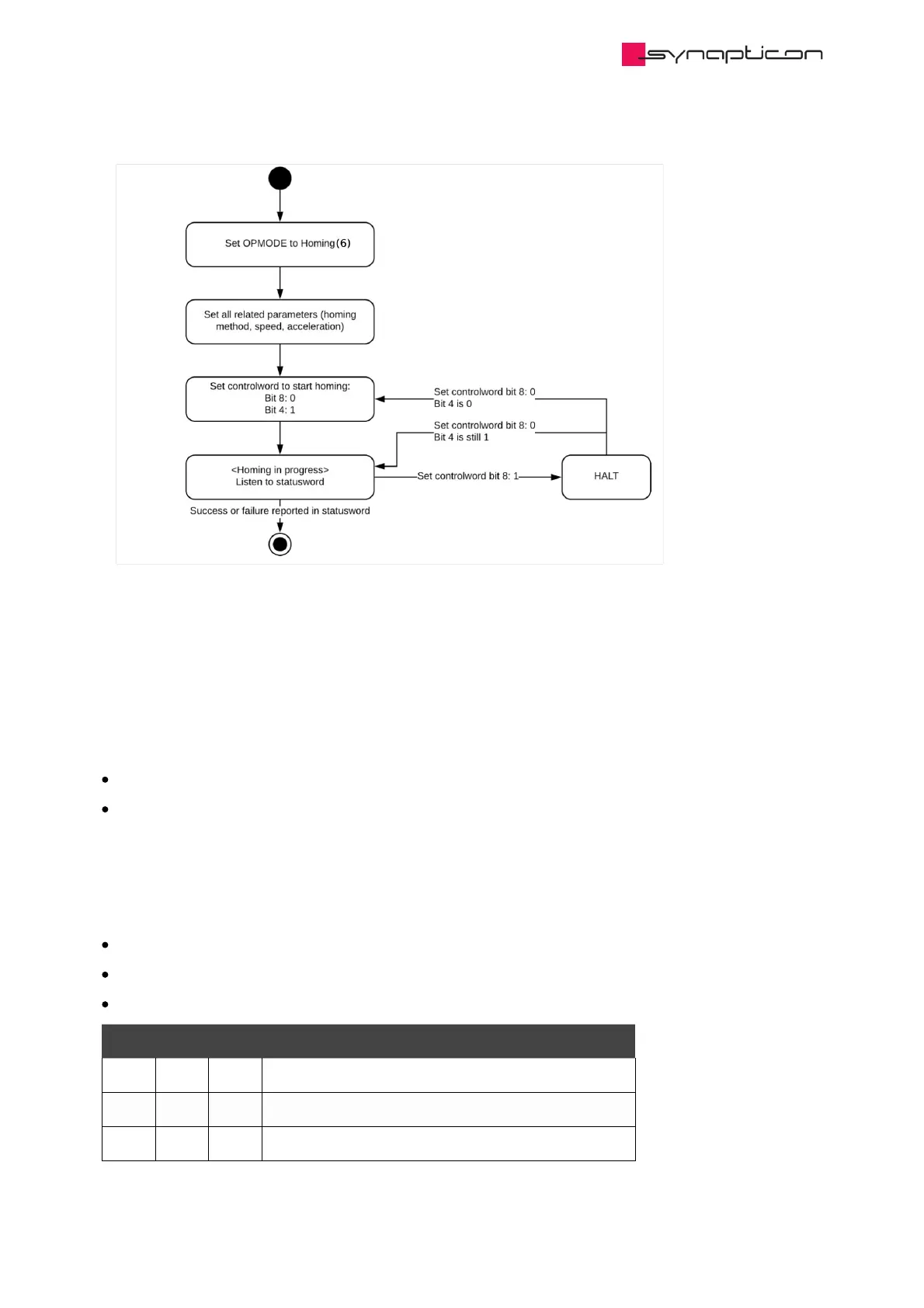
3.1.8.2.3.4.1 Using the Halt bit
The halt bit (bit 8 of the Controlword 0x6040 can be used to stop the drive without disabling the controller:
Set the halt bit to 1 to stop the motion
When the halt bit is reset to 0, the motion continues
3.1.8.2.3.4.2 Status of the homing process
Bits 10, 12, 13 of the Statusword 0x6041 are used to indicate the current state of the homing process:
Bit 13: Homing error
Bit 12: Homing attained
Bit 10: Target reached
Bit 13 Bit 12 Bit 10 Status
0 0 0 Homing is performed
0 0 1 Homing is interrupted or not started
0 1 0 Homing confirmed, but target not yet reached
 Loading...
Loading...

