Number of pulses in one revolution.
This value is automatically calculated using the value of "Singleturn resolution".
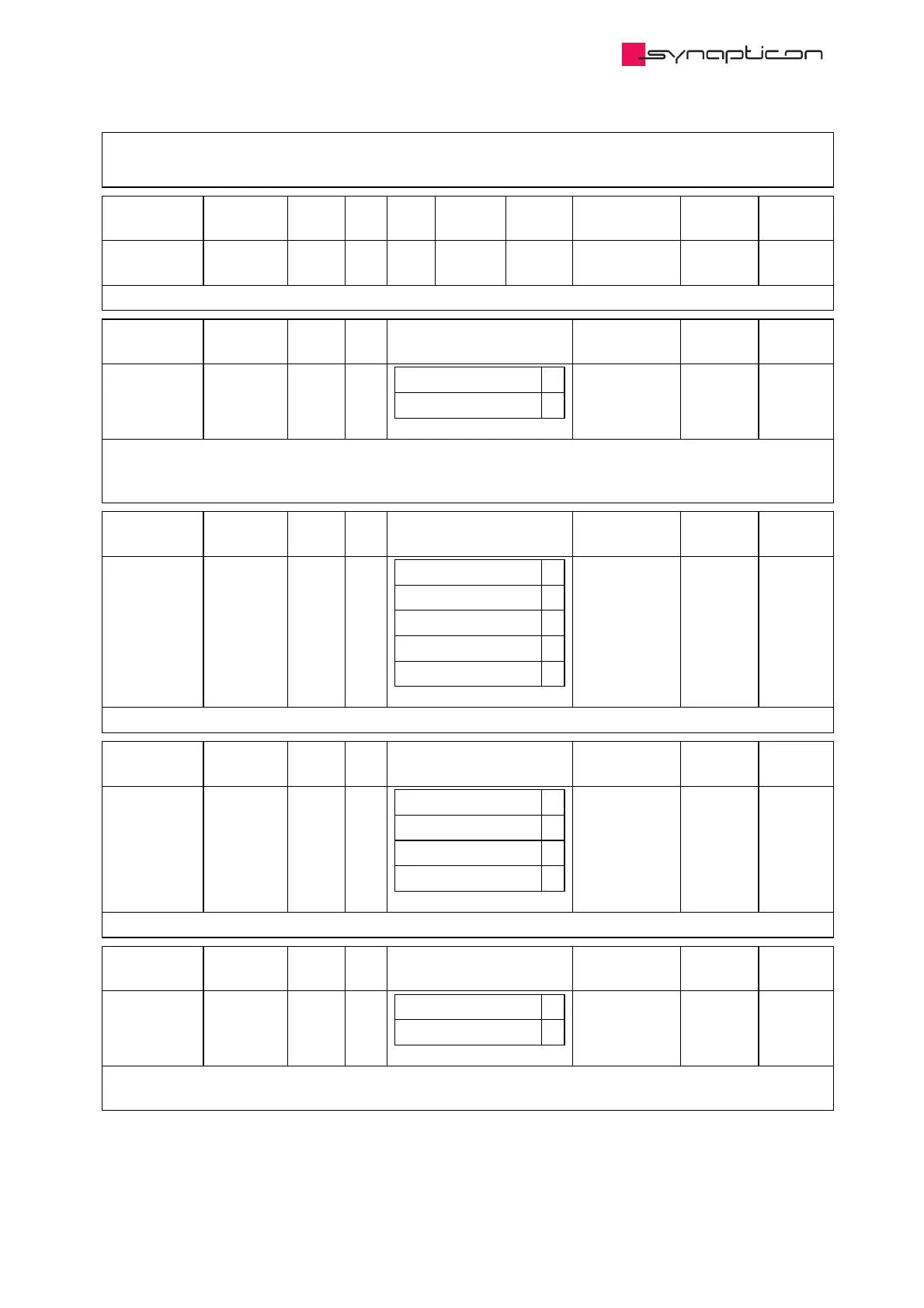
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Zero velocity
threshold
0x220B:4 UDINT 32 0 1000000 0 μs readwrite
Time threshold to set the velocity to 0 if no new position was received from the encoder.
Name Index:Sub Type Bit
Size
Options Unit Access PDO
Mapping
Polarity 0x220B:5 USINT 8
Normal Polarity 0
Inverted Polarity 1
readwrite
If you have an axis with two encoders (one for commutation and one for position and velocity), the direction
of each encoder must match for control stability. This polarity parameter can be used for flipping the direction
of the position or velocity encoder relative to the sensor used for commutation.
Name Index:Sub Type Bit
Size
Options Unit Access PDO
Mapping
Transmission
speed
0x220B:6 USINT 8
2.5 Mbps 0
4 Mbps 1
6.67 Mbps 2
8 Mbps 3
16 Mbps 4
readwrite
See encoder datasheet for more information.
Name Index:Sub Type Bit
Size
Options Unit Access PDO
Mapping
Singleturn
resolution
0x220B:7 USINT 8
17 bits 0
20 bits 1
22 bits 2
24 bits 3
readwrite
See encoder datasheet for more information.
Name Index:Sub Type Bit
Size
Options Unit Access PDO
Mapping
Absolute
encoder type
0x220B:8 BOOL 1
ST-ABS 0
MT-ABS 1
readwrite
Select if the encoder has only singleturn data (ST-ABS) or both multiturn and singleturn data (MT-ABS). See
encoder datasheet for more information.
 Loading...
Loading...

