Figure 8: Progress bar of TwinCAT
3
6. The configuration file is successfully uploaded and stored in the permanent storage of the servo drive. It will
be used once the drive is reinitialized at the transition from BOOT to INIT (or when the drive is power-
cycled).
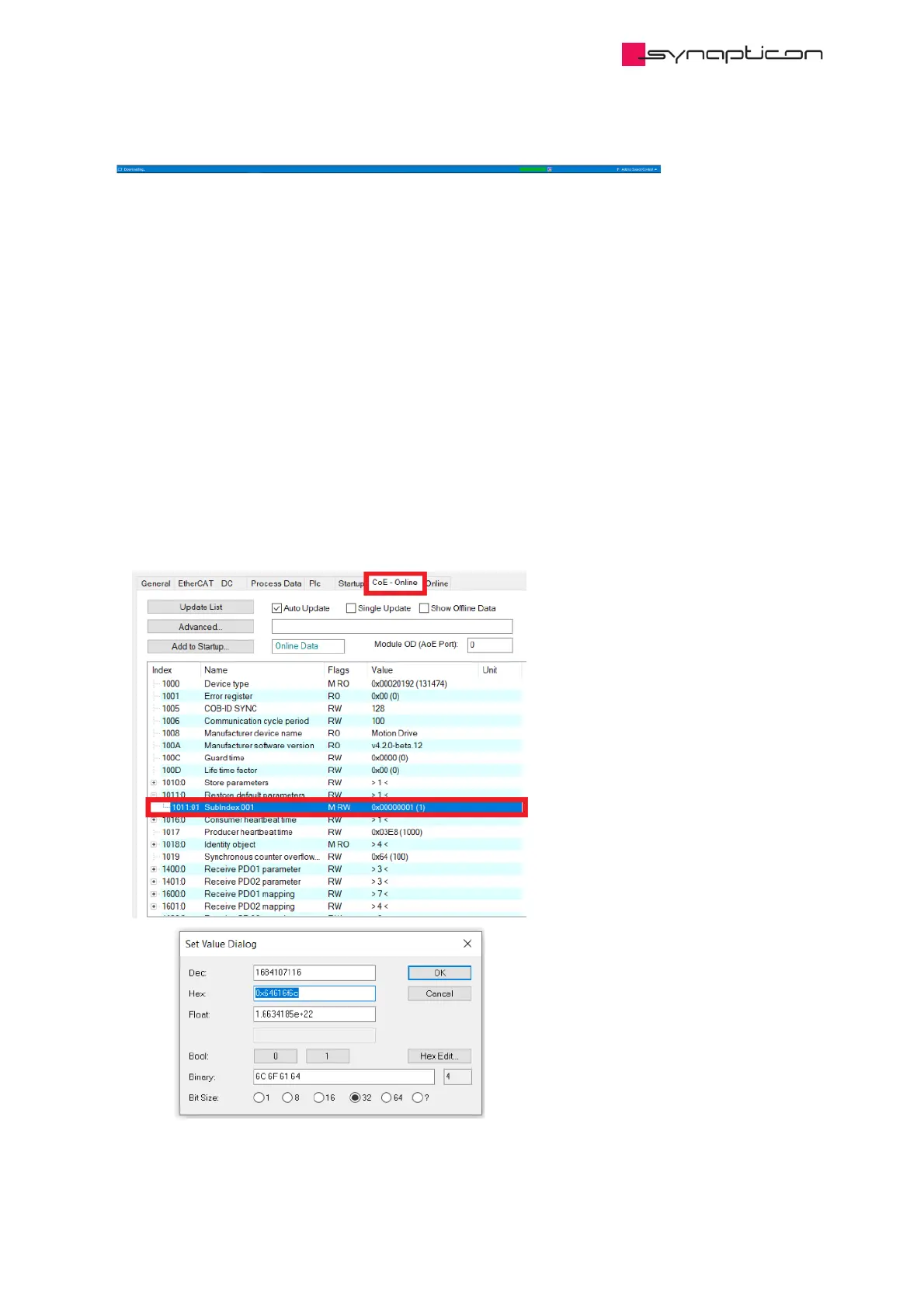
7. In case resetting or power-cycling the drive is not desired, object 0x1011 (“Restore default parameters”)
allows loading from the permanent storage through CANopen over EtherCAT (CoE).
Through SDO operation, read the current value of 0x1011:01 (“Restore all default parameters”). Reading
a value of “1” means the procedure is ready. Write value 0x64616f6c (“daol”, “load” spelled backwards in
ASCII) to 0x1011:01 to start the restore procedure.
In TwinCAT 3, this can be done in the “CoE - Online” tab.
Double-click on the object to write it, as shown in Figure 9.
 Loading...
Loading...

