6.1 Common Settings
6-3
J
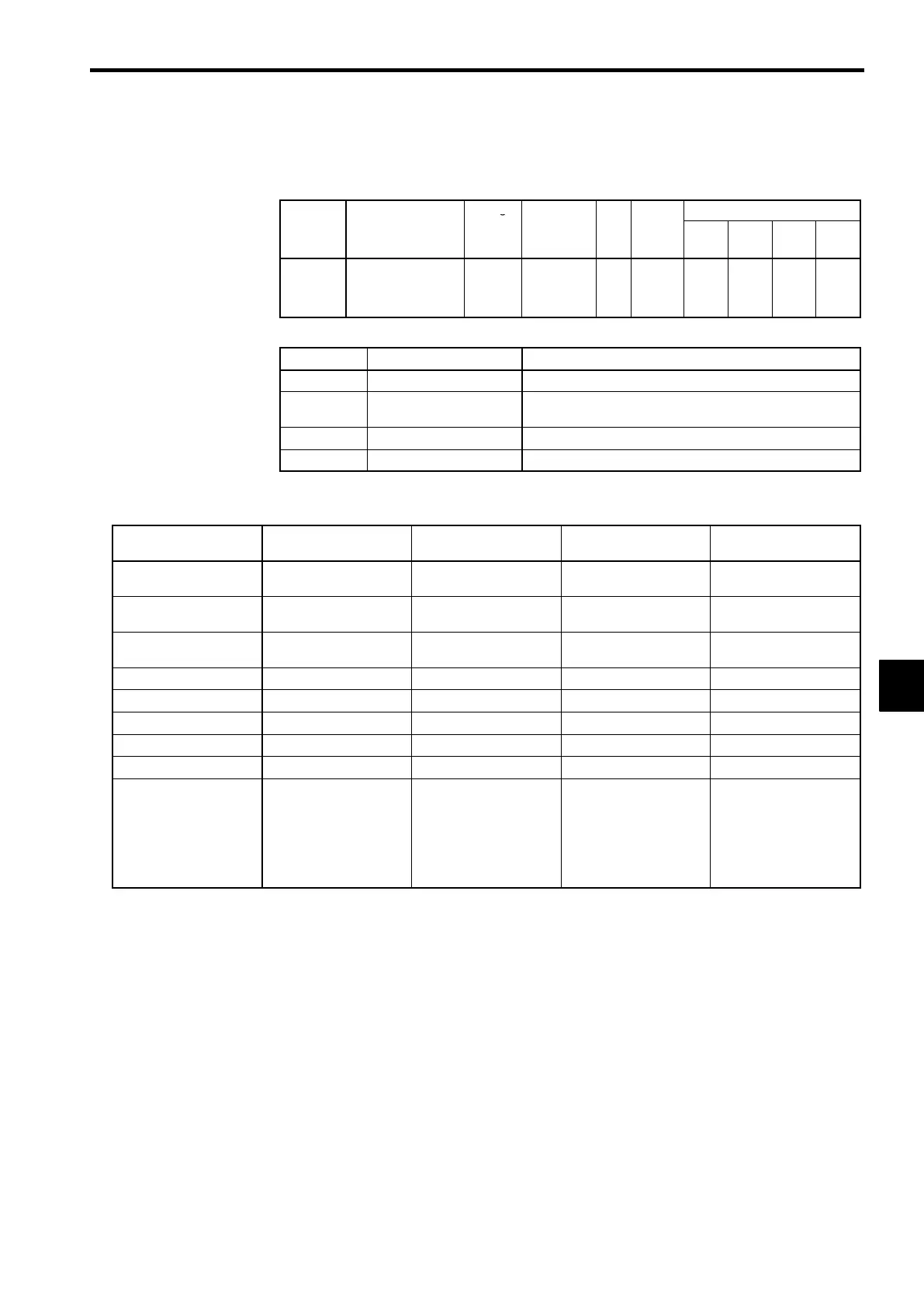
Control Method: A1-02
D
Select one of the four control methods.
D
This constant is not initialized by the initialize operation.
User
Change
Valid Access Levels
Constant
Number
Name
during
Opera-
tion
Setting
Range
Unit
Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
A1-02
Control method
selection
×
0to3 −
2
Open
Loop
Vector
Q Q Q Q
D
Control Method Settings
Setting Control Method Function
0 V/f control
Normal V/f control
1 V/f control with PG feed-
back
V/f control using a PG Speed Control Card
2 Open loop vector control
Vector control using the Inverter’s internal speed information
3 Flux vector control
Vector control using a PG Speed Control Card
D
The characteristics of each control method are shown in Table 6.1.
Table 6.1 Control Method Characteristics
Characteristic V/f Control
V/f Control w/PG Feed-
back
Open Loop Vector Flux Vector
Basic control method
Voltage/frequency control
(open loop)
Voltage/frequency control
with speed compensation
Current vector control
without PG
Current vector control with
PG
Speed detector
Not required
Required
(pulse generator)
Not required
Required
(pulse generator)
Optional speed detec-
tors
Not required PG-A2 or PG-D2 Not required PG-B2 or PG-X2
Speed control range
1:40 1:40 1:100 1:1000
Starting torque
150%/3 Hz 150%/3 Hz 150%/1 Hz 150%/0 r/min
Speed control accuracy
± 2to3% ± 0.03% ± 0.2% ± 0.02%
Torque limit
Not possible Not possible Possible Possible
Torque control
Not possible Not possible Not possible Possible
Example applications
S Multiple motor drives.
S Replacing existing mo-
tor for which motor
constants are not
known.
S When autotuning is not
possible.
S Simple speed feedback
control.
S When a pulse generator
is attached to the ma-
chine axis.
S Variable speed drive ap-
plications.
S Simple servo drives.
S Precision speed control.
S Torque control.
D
Vector control has a greater starting torque and more precise speed control than V/f control, so use of
vector control is recommended whenever possible.
Use V/f control in the following types of applications:
•
When several motors are being operated
•
When special motors, such as submersible motors or spindle motors, are being used
(situations in which auto-tuning cannot be used)
•
When operation is being coordinated with an older V/f control inverter control system
6
 Loading...
Loading...