6.5 V/f Control with PG
6-45
D
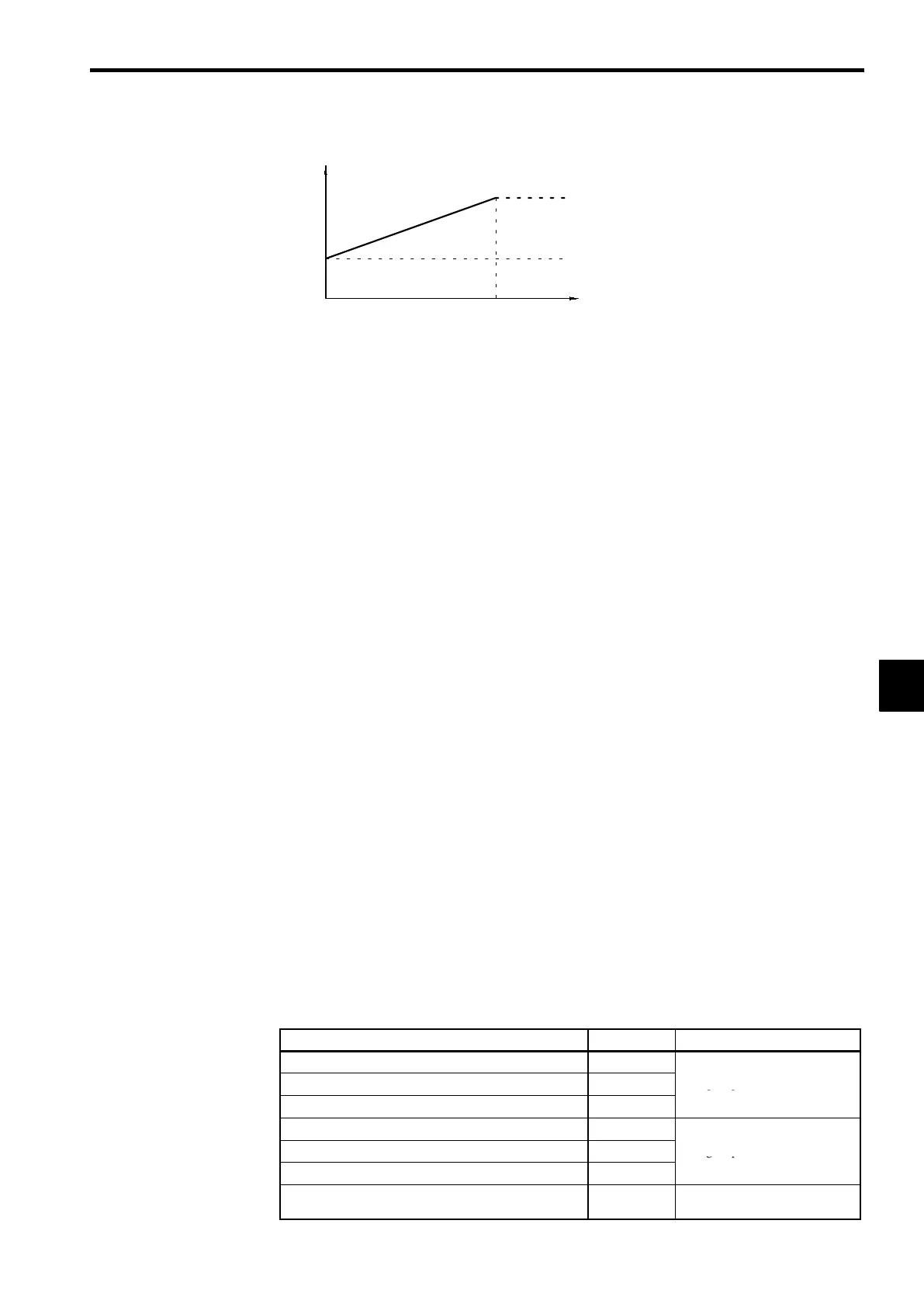
Figure 6.22 shows how the proportional gain and integral time are calculated from constants C5-01
through C5-04.
E1-04
(Max. output frequency)
P, I
0
Motor speed (Hz)
P= C5-01
I = C5-02
P= C5-03
I = C5-04
(Min. output frequency)
Fig 6.22 Minimum Output Frequency Gain Settings
J
Multi-function Input Settings: H1-01 (Terminal 3) to H1-06 (Terminal 8)
No Flux V/f Speed Control Selection: “D”
D
When one of the multi-function inputs is set to “D,” the input can be used to enable and disable the
speed control.
D
The speed control is disabled (normal V/f control) when the multi-function input is ON.
ASR Integral Reset Setting: “E”
D
When one of the multi-function inputs is set to “E,” the input can be used to switch the speed control
between P control and PI control.
D
P control (integral reset) is used when the multi-function input is ON.
6.5.5 Adjusting Speed Control (ASR) Gain
Use the following procedure to adjust the gain with the mechanical system and actual load connected.
J
Gain Adjustments at Minimum Output Frequency
1. Operate the motor at the minimum output frequency.
2. Increase C5-03 (ASR proportional gain 2) to a level where there is no oscillation.
3. Decrease C5-04 (ASR integral time 2) to a level where there is no oscillation.
4. Monitor the Inverter’s output current and verify that it is less than 50% of the Inverter rated current.
If the output current exceeds 50% of the Inverter’s rated current, decrease C5-03 and increase C5-04.
J
Gain Adjustments at Maximum Output Frequency
1. Operate the motor at the maximum output frequency.
2. Increase C5-01 (ASR proportional gain 1) to a level where there is no oscillation.
3. Decrease C5-02 (ASR integral time 1) to a level where there is no oscillation.
J
Gain Adjustments for Integral Control during Acceleration/Deceleration
D
Enable integral operation during acceleration and deceleration (with F1-07) when you want the motor
speed to closely follow the frequency reference during acceleration and deceleration. Integral opera-
tion causes the speed to reach the target speed as fast as possible, but may result in overshooting or
undershooting.
1. Set F1-07 to “1” to enable integral operation at all times.
2. Make the constant settings shown below in order to observe the speed waveform while making fine
adjustments to the gain.
Constant Setting Explanation
H4-01 Analog output selection (terminal 21)
2
-
H4-02 Analog output gain (terminal 21)
1.00
e
ngs
a
a
ow mu
-
unc
on
analog output 1 to be used to mon-
H4-03 Analog output bias (terminal 21)
0.0
itor the output frequency.
H4-04 Analog output selection (terminal 23)
5
-
H4-05 Analog output gain (terminal 23)
1.00
e
ngs
a
a
ow mu
-
unc
on
analog output 2 to be used to mon-
H4-06 Analog output bias (terminal 23)
0.0
itor the motor speed.
H4-07Analog output level selection
1
This setting allows a 0 to ±10 V
signal range to be monitored.
6
 Loading...
Loading...