8.2 Programming Mode Constants
8-25
Con-
stant
Num-
ber
Page
Control Methods
Change
during
Opera-
tion
Factory
Setting
Setting
Range
Description
Name
Con-
stant
Num-
ber
Page
Flux
Vector
Open
Loop
Vector
V/f
with
PG
V/f
Change
during
Opera-
tion
Factory
Setting
Setting
Range
Description
Display
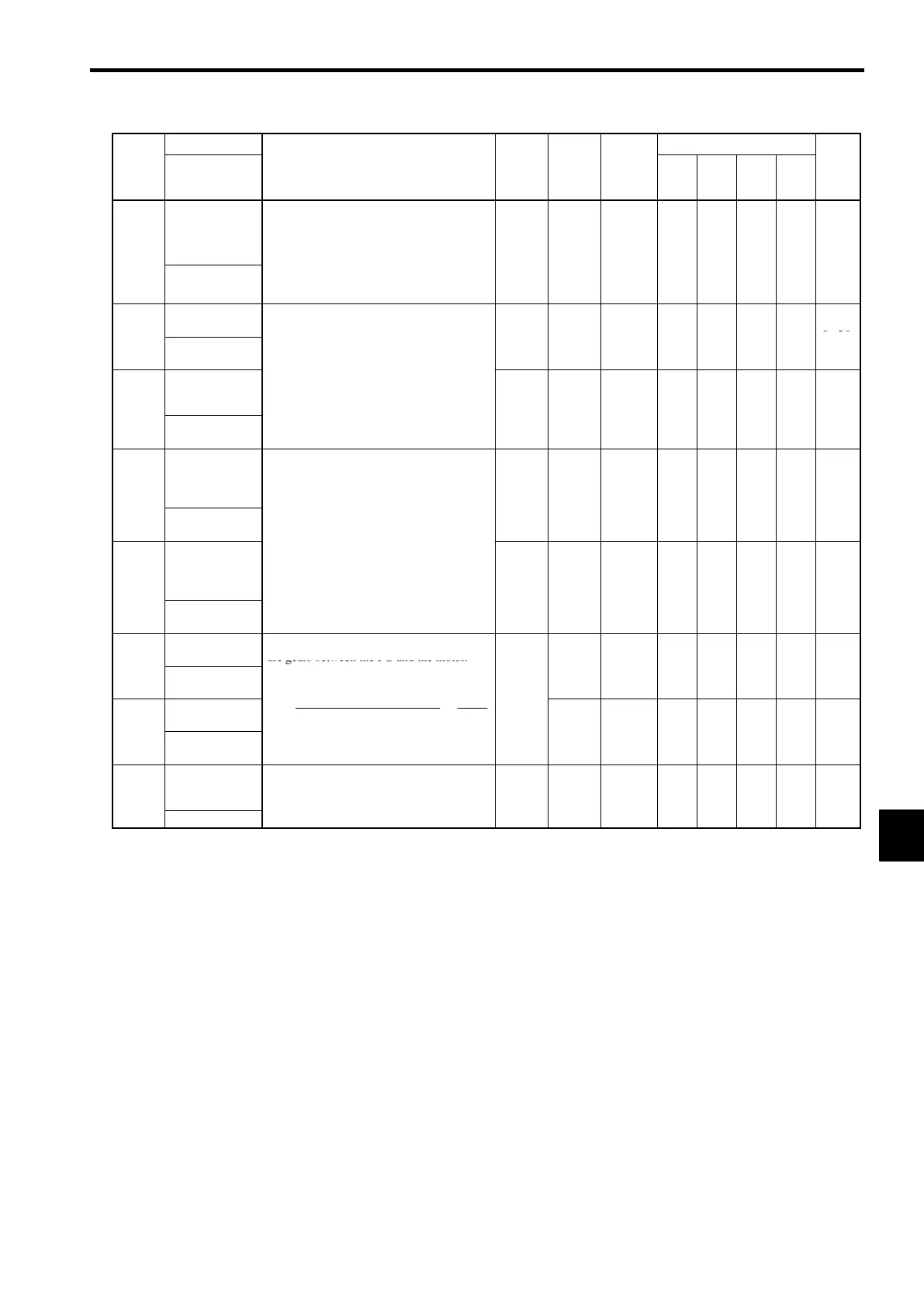
F1-07
Integral value
during accel/
decel enable/
disable
Sets integral control during acceleration/de-
celeration to either enabled or disabled.
0: Disabled (The integral function isn’t
used while accelerating or decelerating;
0, 1 0
× ×
B
× ×
6-42
PG Ramp PI/I
Sel
it is used at constant speeds.)
1: Enabled (The integral function is used at
all times.)
Overspeed
detection level
6-30
F1-08
PG Overspd
level
Sets the overspeed detection method.
Frequencies above that set for F1-08 (set as
0 to 120 115
× ×
A
×
A
6-42
F1-09
Overspeed
detection delay
time
a percentage of the maximum output fre-
quency), which continue to exceed this fre-
quency for the detection time (F1-09), are
0.0 to
0.0 *
× ×
A
×
A
6-30
PG Overspd
Time
.
2.0
.
6-42
F1-10
Excessive
speed devi-
ation detection
level
Sets the speed deviation detection method.
Any speed deviation above the F1-10 set
0to50 10
× ×
A
×
A
6-30
-
PG Deviate
Level
level (set as a percentage of the maximum
output frequency), which continues for the
-
F1-11
Excessive
speed devi-
ation detection
delay time
deviation detection time (F1-11) is detected
as a speed deviation.
:Speed deviation is the difference between
actual motor speed and the reference
0.0 to
10.0
0.5
× ×
A
×
A
6-30
-
PG Deviate
Time
comman
spee
.
.
-
Number of PG
gear teeth 1
Sets the number of teeth on the gears if there
are gears between the PG and the motor.
F1-12
PG# Gear
Teeth 1
Motor speed (r∕min)
Load gear teeth
No. of
ulses in
ut PG × 60
0to
0
× ×
A
× ×
6-42
Number of PG
gear teeth 2
Motor gear teeth
=
.
No. of PG pulses(F1-01)
×
F1-13
F1-12
1000
F1-13
PG# Gear
Teeth 2
:A gear ratio of 1 will be used if either of
these constants is set to 0.
0
× ×
A
× ×
6-42
F1-14
PG open-cir-
cuit detection
time
Used to set the PG disconnection detection
time. PGO will be detected if the detection
0.0 to
10.0
2.0
× ×
A
×
A
−−
PGO Time
time continues beyond the set time.
.
* The setting range will change when the control method is changed. (The setting range for Open loop vector control will be dis-
played.)
8
 Loading...
Loading...