3.4
I/O Modules (Optional)
3-43
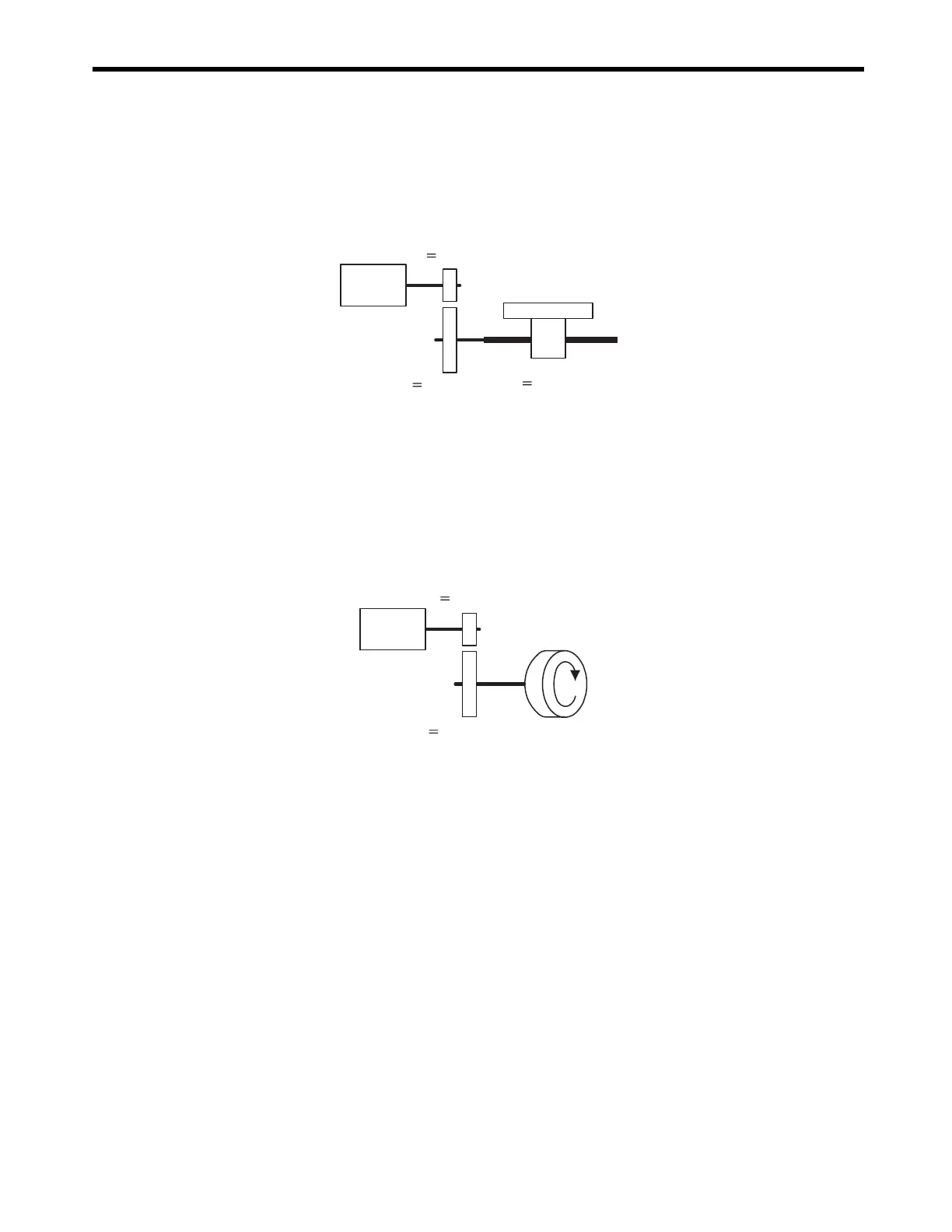
( 6 ) Electronic Gear Setting Examples
The following are setting examples for each kind of load mechanical configuration.
[ a ] Example A: Ball Screw
In the above machine system, if the reference unit = 0.001 mm, the setting of each parameter will be
as follows:
•
Moving Amount Per Machine Rotation
= 6 mm/0.001 mm = 6000
• Counter fixed parameter No. 11 (Encoder Gear Ratio) =
7
(rotations)
• Counter fixed parameter No. 12 (Machine Gear Ratio) =
5
(rotations)
[ b ] Example B: Rotating Load
In the above machine system, if the reference unit = 0.1
°
, the setting of each parameter will be as
follows:
• Moving Amount Per Machine Rotation = 360°/0.1° = 3600
• Counter fixed parameter No. 11 (Encoder Gear Ratio) =
3
(rotations)
• Counter fixed parameter No. 12 (Machine Gear Ratio) =
1
(rotation)
m 7 rotations
n
5 rotations
Ball screw pitch
P
6mm/rotation
Encoder
Rotating load
360°/rotation
Encoder
m
30 rotations
n
10 rotations

 Loading...
Loading...




