7
Motion Commands
7.2.1
Positioning (POSING)
7-6
Terminology: Command execution
When a command code is stored in the motion command register (OW
08), execution of the motion
command corresponding to that code is started. Used in describing motion command operations.
( 2 ) Holding
Axis travel can be stopped during command execution and then the remaining travel can be restarted.
A command is held by setting the Command Pause bit (OB
090) to 1.
• Set the Command Pause bit (OB
090) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the Command Hold Completed bit (IB
091) will turn ON.
• Reset the Command Pause bit (OB
090) to 0. The command hold status will be cleared
and the remaining portion of the positioning will be restarted.
( 3 ) Aborting
Axis travel can be stopped during command execution and the remaining travel canceled by aborting
execution of a command. A command is aborted by setting the Command Abort bit (OB
091) to
1.
• Set the Command Abort bit (OB
091) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the remain travel will be canceled and the Positioning Com-
pleted bit (IB
0C1) will turn ON.
• The positioning will restart if the Command Abort bit (OB
091) is reset to 0 during abort
processing.
• This type of operation will also be performed if the motion command is changed during axis
movement.
( 4 ) Related Parameters
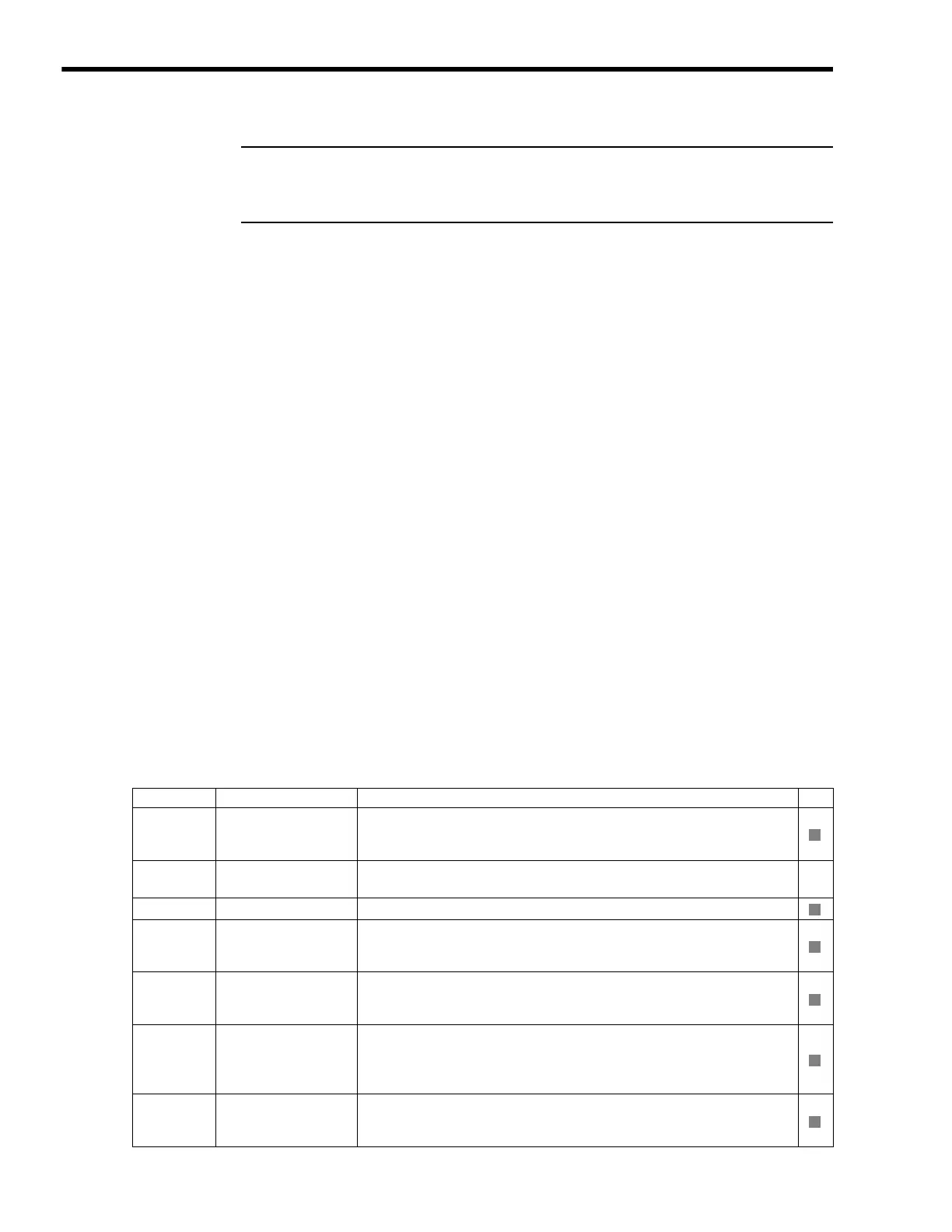
[ a ] Setting Parameters
Parameter Name Setting SVR
OB
000
Servo ON
Turn the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Turn ON the power before setting the Motion Command (OW
08) to 1.
OB
013
Speed Loop
P/PI Switch
Switch the speed control loop between PI control and P control.
0: PI control, 1: P control
−
OW
03
Function 1
Set the speed unit, acceleration/deceleration unit, and filter type.
OW
08
Motion Command
The positioning starts when this parameter is set to 1.
The operation will be canceled if this parameter is set to 0 during POSING
command execution.
OB
090
Command Pause
The axis will decelerate to a stop if this bit is set to 1 during POSING command
execution.
The positioning will restart if this bit is reset to 0 when a command is being held.
OB
091
Command Abort
The axis will decelerate to a stop if this bit is set to 1 during POSING command
execution.
When this bit is reset to 0 after decelerating to a stop, the operation depends on
the setting of the Position Reference Type (OB
095).
OB
095
Position Reference
Type
Switch the type of position reference.
0: Incremental addition mode, 1: Absolute mode
Set this bit before setting the Motion Command (OW
08) to 1.
R
R
R
R
R
R

 Loading...
Loading...




