7
Motion Commands
7.2.2 External Positioning (EX_POSING)
7-12
positioning operation.
( 2 ) Holding
Axis travel can be stopped during command execution and then the remaining travel can be restarted.
A command is held by setting the Command Pause bit (OB
090) to 1.
• Set the Command Pause bit (OB
090) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the Command Hold Completed bit (IB
091) will turn ON.
• Reset the Command Pause bit (OB
090) to 0.
The command hold status will be cleared and the remaining portion of the positioning will
be restarted.
( 3 ) Aborting
Axis travel can be stopped during command execution and the remaining travel canceled by aborting
execution of a command. A command is aborted by setting the Command Abort bit (OB
091) to
1.
• Set the Command Abort bit (OB
091) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the remain travel will be canceled and the Positioning Com-
pleted bit (IB
0C1) will turn ON.
• This type of operation will also be performed if the motion command is changed during axis
movement.
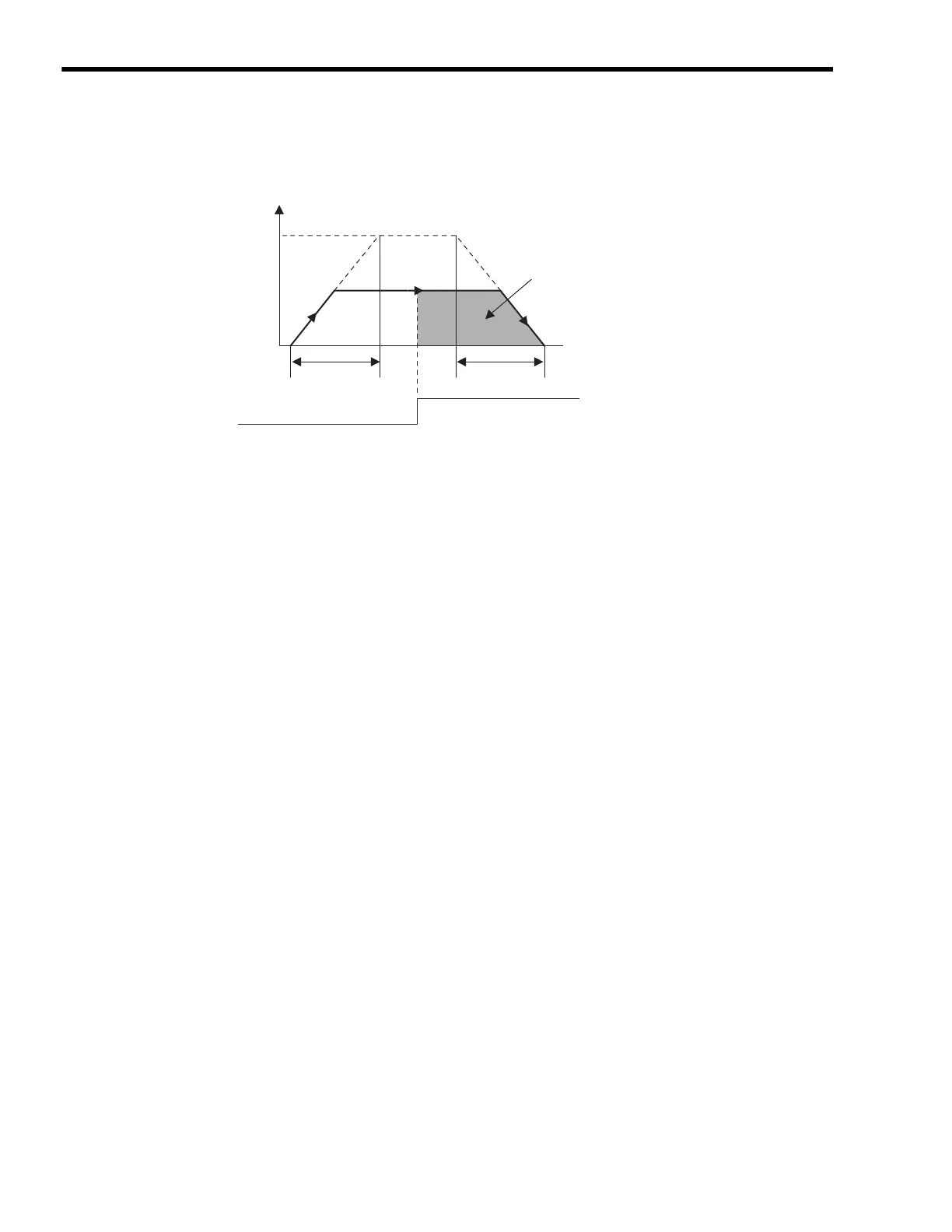
EX_POSING Operating Pattern
Speed
(%)
(100%)
0
Time (t)
Linear deceleration time
Rated speed
Latch signal
(external positioning signal)
Positioning
speed
External positioning
move distance
Linear
acceleration time

 Loading...
Loading...




