11.1
Parameters That Are Automatically Updated
11-3
11.1.2 Parameters Updated when a MECHATROLINK Connection Is Established (2)
(Regardless of the User Constants Self-Writing Function)
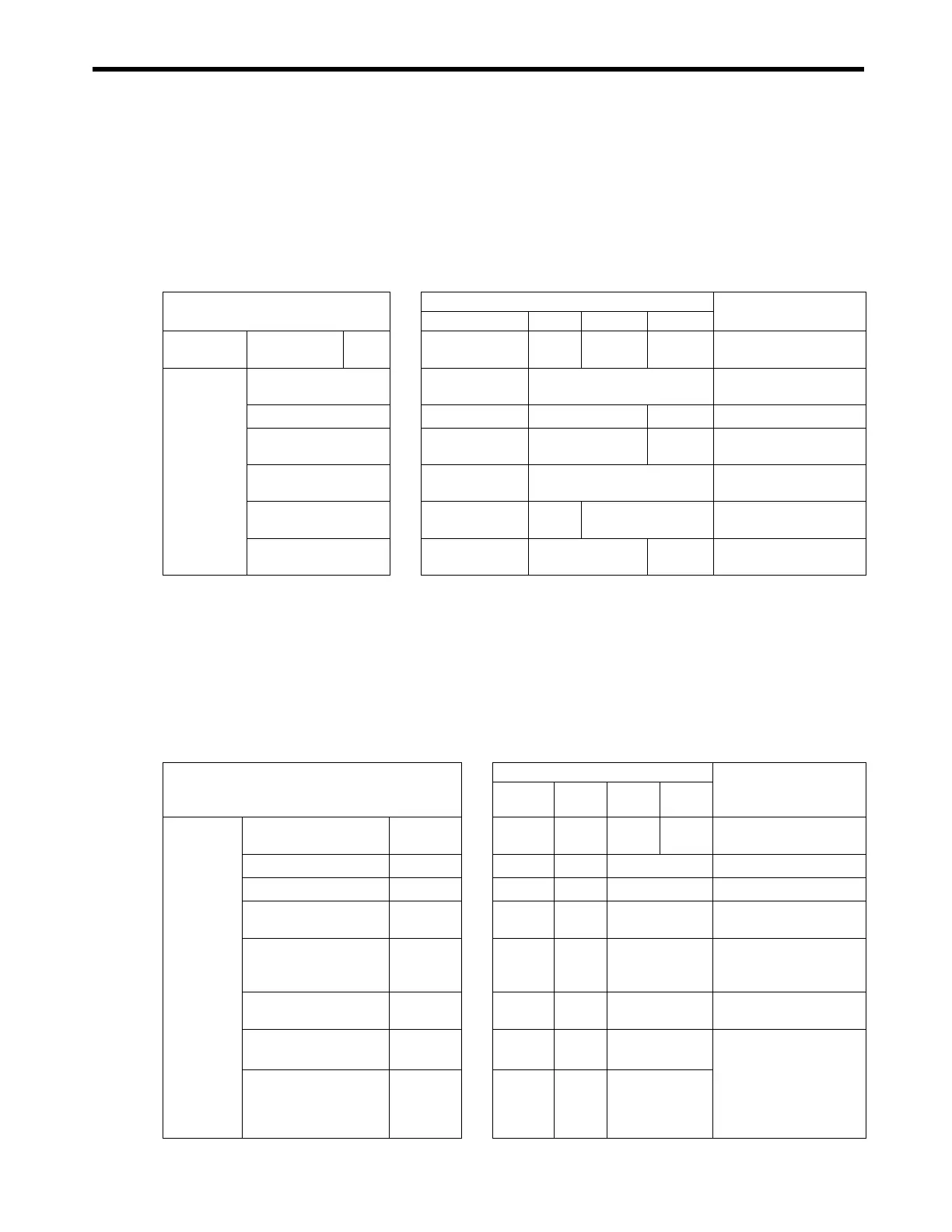
The MP2300 parameter settings in the left table below are automatically written to the SERVOPACK
parameters in the right table below when a connection is established between the MP2300 and the
SERVOPACK. The parameters are written regardless of whether automatic updating of parameters is
enabled or disabled at bit A of fixed parameter 1 in the MP2300.
11.1.3 Parameters Updated when a Setting Parameter Is Changed
(MECHATROLINK-
II
Operating at 10 Mbps in 32-byte Mode with User
Constants Self-Writing Function Enabled)
When automatic updating of parameters is enabled at bit A of fixed parameter 1 in the MP2300, the
parameters shown in the right table below are automatically updated every time the MP2300 setting
parameters in the left table below are updated. Updating occurs on all SERVOPACKs connected to a
MECHATROLINK-II operating at 10 Mbps in 32-byte mode.
Settings are not written when using MECHATROLINK-II operating at 10 Mbps in 17-byte mode.
MP2300
SERVOPACK Parameter
Remarks
SGD-N, SGDB-N NS100 NS115 SGDS
Fixed
parameters
Backlash
Compensation
No.16
−−
Pn81B Pn214
−
Fixed
values
65535
→
Cn-001E
−
Excessive Position Error
Area
32767
→
−
Pn505
−
Overflow Level
2
30
-1
→
−−
Pn520
Excessive Position Error
Alarm Detection Level
100
→
−
Pn51E
Excessive Position Error
Warning Detection Level
Pn820 and Pn822 are
set to the same value.
−−
Pn820 -
>
Pn822
Processing to disable the
latch zone
0002
−
Pn0003 Pn824
Set the Torque Reference
from the Option Monitor.
MP2300
SERVOPACK
Remarks
SGD-N,
SGDB-N
NS100 NS115 SGDS
Setting
parameters
Position Completed
Width
OL
1E
→
−−
Pn500 Pn522
−
Position Loop Gain
OW
2E
→
−−
Pn102
−
Speed Loop Gain
OW
2F
→
−−
Pn100
−
Speed Feed Forward
Compensation
OW
30
→
−−
Pn109
−
Position Loop
Integration Time
Constant
OW
32
→
−−
Pn11F
−
Speed Loop Integration
Time Constant
OW
34
→
−−
Pn101
−
Accel/Accel Time
Constant
*
OL
36
→
−−
Pn80B
* Also updated
automatically when bits
4 to 7 of OW
03
(Acceleration/
Deceleration Unit) are
changed.
Decel/Decel Time
Constant
*
OL
38
→
−−
Pn80E

 Loading...
Loading...




