217
Program description - Fail-safe
onds when you switch the transmitter on:
Fail Safe
setup
t.b.d.
Programming procedure
The “Fail Safe” function determines the behavior of the
receiver if communication between the transmitter and
the receiver is disrupted. Receiver outputs 1 … 8 on
the
mc-16 HoTT transmitter, or 1 … 12 on the mc-
20 HoTT transmitter can optionally …
• ... Immediately take after switching the receiving
system and as long as there is no radio connection
to the transmitter, previously stored in the receiver
positions. Completely independent of whether the
corresponding output to “hold” or “Pos” is pro-
grammed.
By default, set to the fi rst save of the
fail-safe positions the centre position.
• ... in the event of a fault either ...
1. preserve the current position (“hold”):
If communication is disrupted, all servos pro-
grammed to “hold” mode remain at the positions
judged to be the last valid positions by the recei ver
until the receiver picks up another valid control sig-
nal, or
2. move to a freely selectable position (“Pos”) if inter-
ference should occur, following the expiry of the
“time delay”.
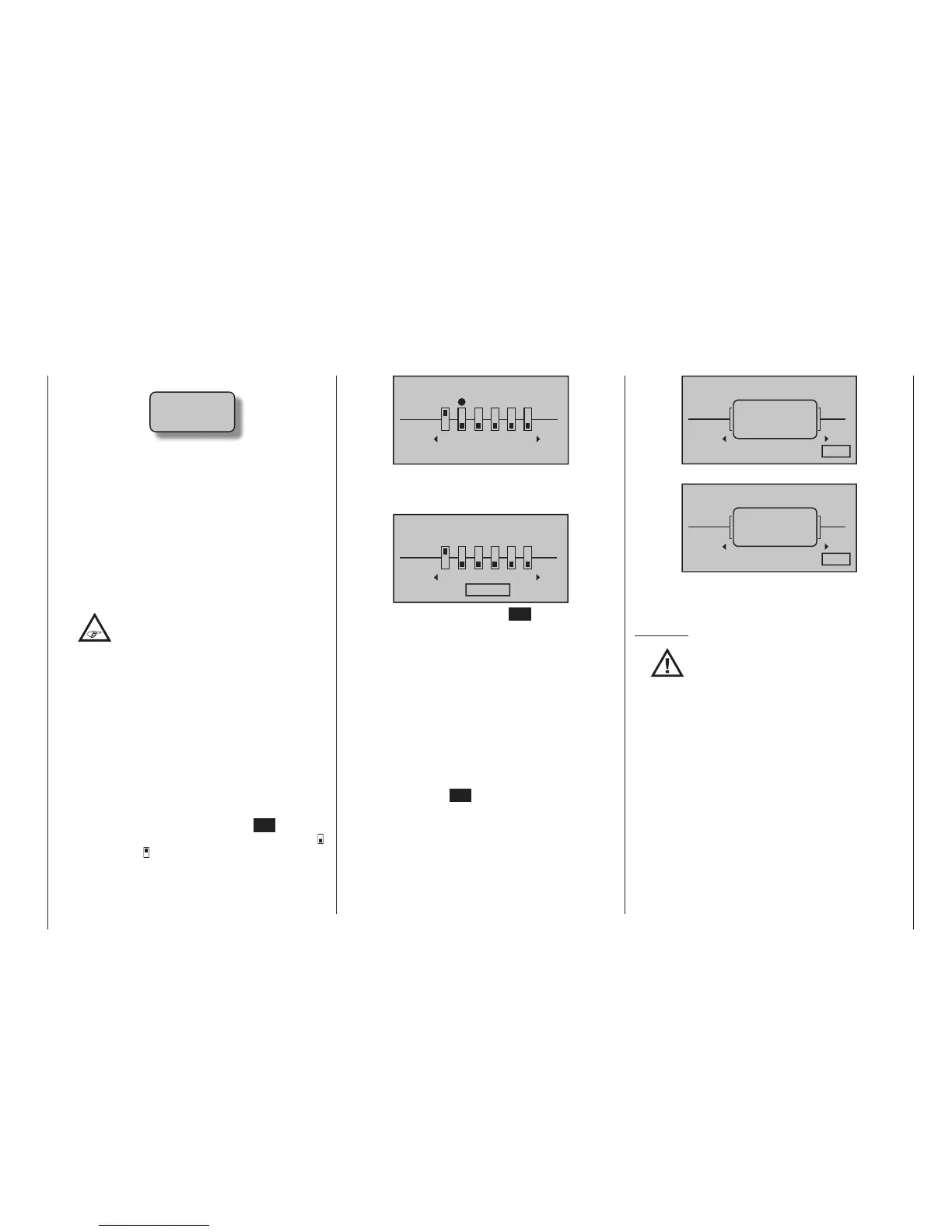
Use selection keys on the left or right four-way
button to select the desired servo connection 1 … 8 (
)
or 1 … 12 () then briefl y tap the centre SET key of the
right four-way button to freely switch between “hold” ( )
and “Pos” mode ( ):
1 2 3
4
5
6
STO
Fail-safe adjust
Pos
hold
DELAY : 0.25s
Following this, use the selection keys on the left
or right four-way button to select the “DELAY” option
shown at the bottom of the display …
7 8 9
10
11
12
STO
Fail-safe adjust
Pos
hold
DELAY : 0.25s
… and then briefl y tap the centre SET key of the right
four-way button. Now use the four-way button’s selec-
tion keys to make your choice from the four possible
time delays (0.25 s, 0.5 s, 0.75 s and 1 s) offered.
A simultaneous tap on the or selection keys
of the right four-way button (CLEAR) will reset the
inverse video fi eld to its default value 0.25 s.
Afterwards, select the STO fi eld at the bottom right of
the display with the selection keys on the left or
right four-way button. Now put the servos which have
been switched into position mode into their desired
positions SIMULTANEOUSLY with the respective oper-
ating elements.
Briefl y tap the centre SET key of the right four-way
button to store these positions as the fail-safe setting
for the receiver, so that it can revert back to them if
interference is experienced. Successful storage of the
positions is confi rmed briefl y on the screen:
7 8 9
10
11
12
STO
Position
stored
Fail-safe adjust
Pos
hold
DELAY : 0.25s
However, if instead the message ...
7 8 9
10
11
12
STO
No binding
Fail-safe adjust
Pos
hold
DELAY : 0.25s
... is displayed, there is no connection to a receiver. So
switch on if necessary the RF module of the transmitter
and / or receiver system of your model.
Attention:
•
Please note that decisive fail-safe set-
tings are stored in the receiver! There-
fore, following a change of receivers,
these fail-safe settings should be renewed and
in the previous receiver they should be erased,
if necessary per Reset, see page <?>.
• Ensure you make use of this safety net by at
least programming the following for a fail-safe
incident: for glow-powered models, set the
motor throttle position to idle; for electric mod-
els, set the motor function to stop, or “Hold”
for helicopter models. If interference should
occur, the model is then less likely to y off on
its own and cause damage to property or even
personal injury. Consider asking an experi-
enced pilot for advice.

 Loading...
Loading...








