298
Programming examples - Parallel operating servos
Parallel operating servos
A second servo running in parallel is often required,
such as when brake flaps or spoilers installed in the
wings or the left and right elevator or a double fin
should be actuated by a servo or a large rudder flap
should be simultaneously controlled by two servos due
to high throw forces.
In principle, this task could also be solved by connec-
ting the servos together on the model side using Y-
cable. However, the disadvantage here is that servos
combined in this manner can no longer be adjusted
individually and separately from the transmitter – thus
negating the potential for finely tuning respective servos
to one another with a computerized remote control
system. A similar situation is given for the so-called
“Channel mapping” feature of the »Telemetry« menu.
Here too there are certain limitations involved when
compared to the transmitter’s adjustment possibilities.
The first example, therefore, describes the coupling of
two brake or spoiler servos, the second describes the
operation of two or more throttle servos and the third
describes the coupling of two elevator servos.
The “two rudder servos” example on the next page
describes the coupling of two rudder servos, whereas
Variant 1 is preferable for applications of this type
because this solution is easier and quicker to program,
using one of the »Dual mixer« menu, which is available
on the
mc-20 HoTT transmitter only. In contrast, the
second variant, also described on the next page, ad-
ditionally permits asymmetric and/or non-linear curves
through use of the »Free mixer« menu.
Two brake or spoiler servos
In a situation where there is one installed servo for op-
eration of brake flaps and/or spoilers in each wing half
then the pre-set linear control characteristics for the
»Channel 1 curve« menu should remain unchanged.
Then connect one of the two servos to Output 1,
provided for this purpose by standard, and the second
to an arbitrary free receiver connection 5 … 12 max.,
such as Output “8”. Subsequently switch to the menu
…
»Control adjust« (page 112)
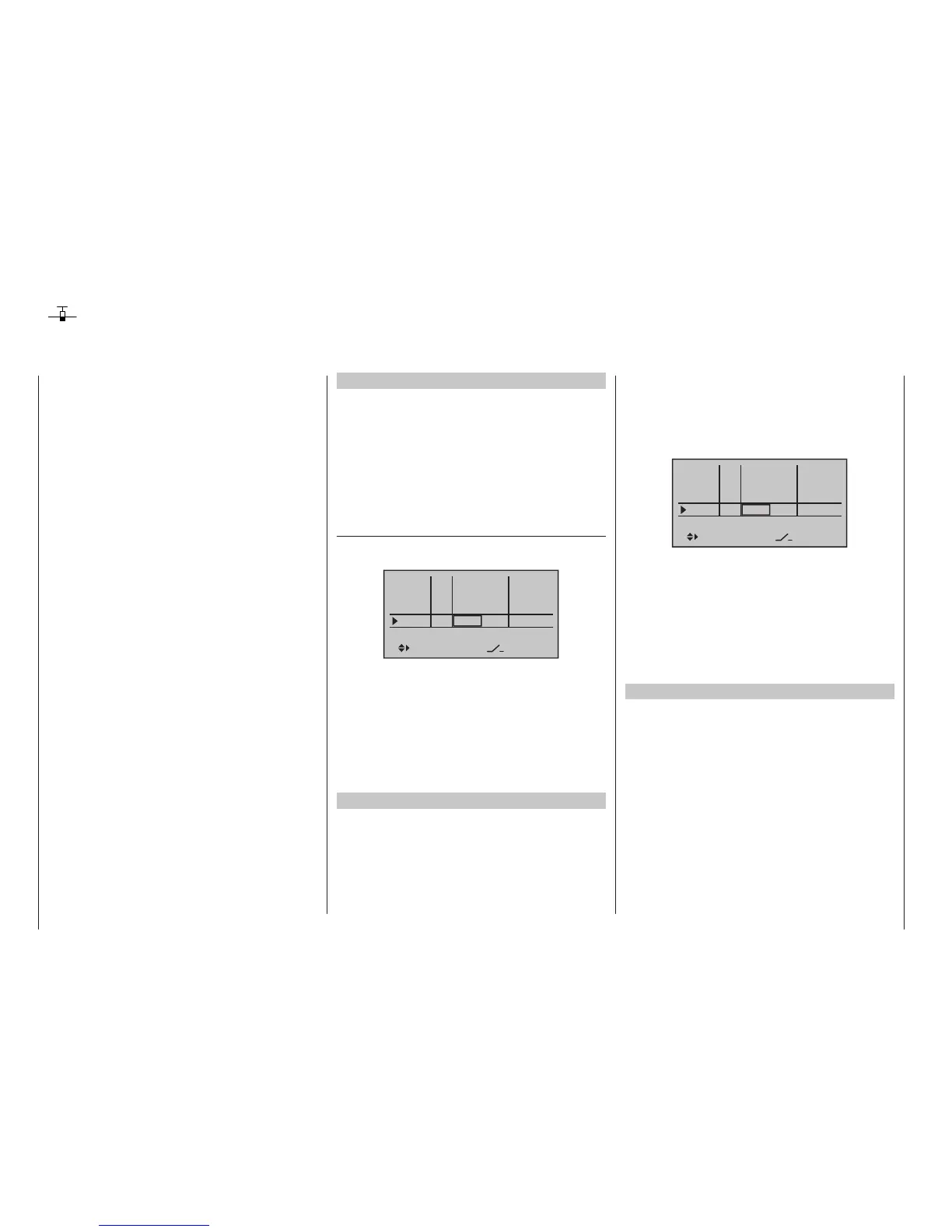
… and, using the selection keys, assign “Control 1” in
the Input 8 line :
In5
offset
0%
0%
0%
–––
In6
In7
In8
–––
–––
–––
GL
GL
GL
typ
Landung
fr
fr
fr
Cn1
SEL
GL 0%
Since the spoiler on Output 1 can normally only be
operated on a flight-phase independent basis, it is
strongly recommended that the “Type” column for the
input used is left at its “GL” (“global”) default setting.
Also the remaining values should be left at their default
settings. If necessary, carry out the required servo
travel adjustments in the »Servo adjustment« menu
(page 106). There you can also adjust the travel of
servo 1and 8 to one another, if necessary.
Multiple-motor aircraft
As described above, a model can also be operated
with two or more motors.
The first throttle servo and/or the first motor control is
connected as usual to (receiver) Output 1 and each
additional throttle servo and/or each additional motor
control is connected to a free (receiver) Output 6 … 12
max. The inputs of respective assigned control chan-
nels are then each assigned to Control 1; for example:
In8
offset
0%
0%
0%
–––
In9
In10
In11
–––
–––
–––
GL
GL
GL
typ
Landung
Cn1
SEL
GL 0%
Cn1
Cn1
Cn1
The remaining values should be left at the default set-
tings. If you need to adjust servo travels, it is better to
use the »Servo adjustment« menu (page 106), where
you can adjust the settings as required without having
to switch menus.
Since the motor control unit should be available regard-
less of a currently active flight phase, make sure to
leave the standard default “GL” (“global”) in the “Type”
column.
Two elevator servos
Two elevator servos should be switched in parallel.
According to the receiver assignment plan, see page
65, the receiver output 8 is intended for the connec-
tion of the second elevator servo.
This would be taken into account on the software side
in the pre-configuration of a corresponding mixer. You
can find this in the …

 Loading...
Loading...








