86
Program description - Base setup models | Winged models
and
mc-20 HoTT transmitters as an emergency
OFF function as well as an alternative “cut-off trim”, see
“digital trims” on page 62.
This motor OFF position (Thr. CutOff) is specified in
the left column field over the column label SEL and its
value is to be established through trial and error.
However, the speed controller or throttle servo only
moves to the selected position when two conditions
are fulfilled: a switch is operated, and a particular servo
position or switching threshold is exceeded.
This is done by setting the desired servo position
(threshold value) into the middle column field, directly
over the column label STO, then selecting the appro-
priate ON/OFF switch function in the right column.
• If the percentage value specified for the middle col-
umn is greater than the current servo position, i. e.
the current servo position lies below the threshold,
the switchover will occur as soon as the switch is
put into its ON position.
• If the percentage value specified for the middle
column is less than the current servo position, i. e.
the current servo position is above the threshold,
the speed controller will initially reduce motor speed
or close the carburettor’s throttle servo only to the
extent dictated by the value in the left column as
soon as the servo’s position once underruns the
threshold (max. +150 %) after the switch is changed
over to its ON position.
The speed controller or throttle servo will remain in
this cut-off position only until the selected switch is
again changed over followed by a one-time throt-
tle servo or speed controller movement beyond the
preset threshold with the throttle/brake stick control.
The factory setting for the left column is -100 % for
the throttle servo “cut-off” position and a threshold of
+150 % servo position setting in the middle column.
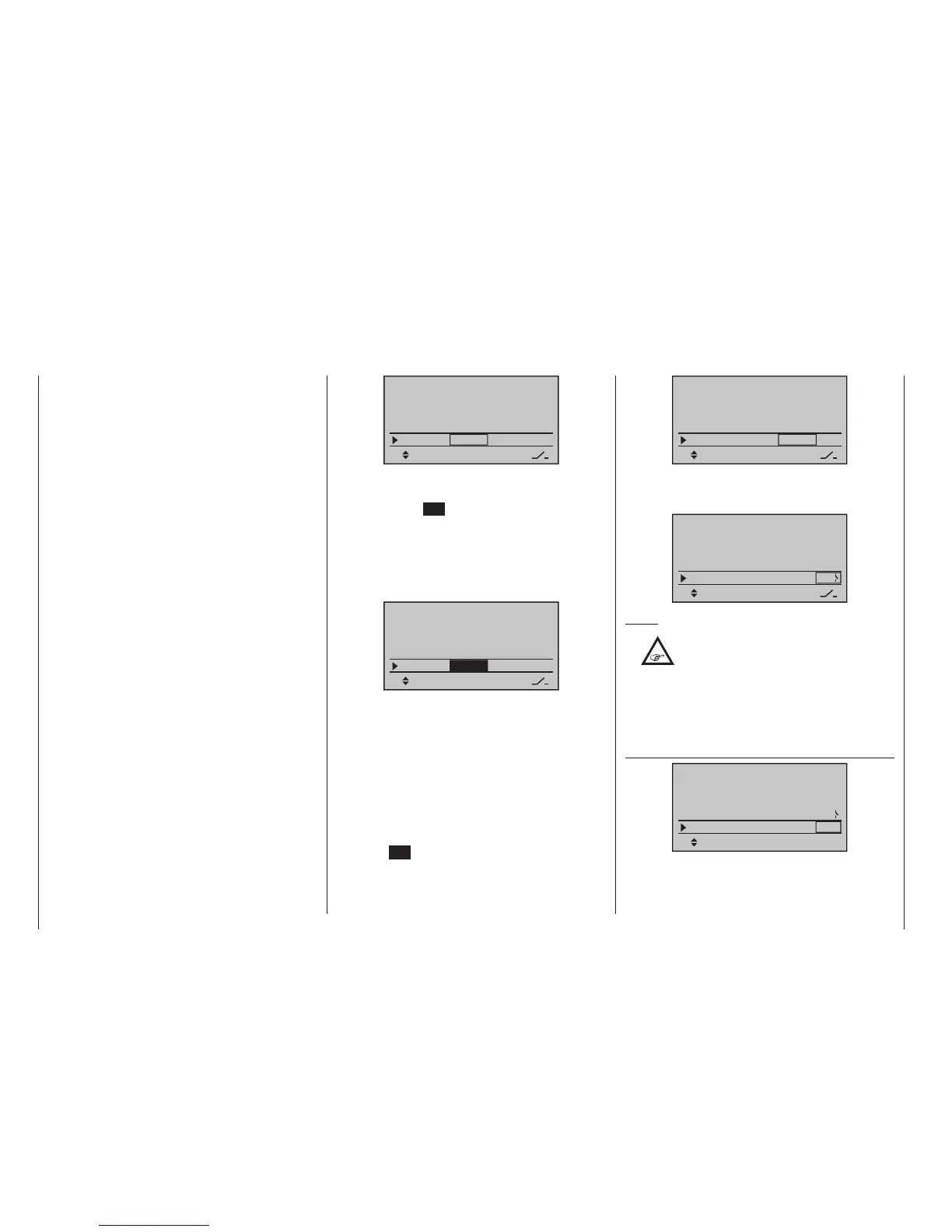
Base setup model
RF transmit ON
RF Range Test 99sec
DSC Output PPM10
cut off
SEL
–––
+150%
STO
–100%
Programming procedure
To change the throttle servo’s preset “cut-off” position,
tap on the centre SET key of the right four-way button.
The current setting will be displayed in inverse video.
Now use the selection keys of the left or right four-way
button to set a value at which the motor is reliably “off”.
If a combustion motor is involved, be sure the throt-
tle servo does not perform mechanical runout, e. g.
-125 %:
Base setup model
RF transmit ON
RF Range Test 99sec
DSC Output PPM10
cut off
SEL
–––
+150%
STO
–125%
The – upper – preset value in the middle column ensures
the motor can be stopped, throughout the maximum
possible positioning range of the servo or speed con-
troller, alone by the switch to be assigned in the right
column.
However, if you wish to set a lower threshold, by which
an underrun will cause the throttle servo or speed
controller with closed switch to switch into the cut-off
position, reduce the preset servo travel from +150 %
by placing the throttle servo or speed controller into the
desired position with the throttle/brake stick then touch
the centre SET key of the right four-way button.
Base setup model
RF transmit ON
RF Range Test 99sec
DSC Output PPM10
cut off
SEL
–––
+100%
STO
–125%
Finally, use the column at the right to specify a switch
with which you can cut off the motor directly (emergen-
cy) or which will be activated by the threshold.
Base setup model
RF transmit ON
RF Range Test 99sec
DSC Output PPM10
cut off
SEL
+100%
STO
–125%
8
Notes:
•
Be sure the throttle servo does not run out
mechanically when the cut-off function is
activated.
• A threshold over +100 % is reached by tempo rarily
increasing the travel for servo 1 in the »Servo ad-
justment« menu to over 100 % then, after storing
the threshold, change servo travel back to the
original value.
Auto timer reset
Base setup model
RF Range Test 99sec
DSC Output PPM10
cut off
SEL
+100%–125%
8
Auto timer reset yes
The “yes/no” setting made in this line determines
whether or not all of the transmitter’s timers (except
for “Model time” and “Transmitter operating time”) are
automatically reset to their given starting values when

 Loading...
Loading...








