XPS Unified Programmer’s Manual
7.2.1.217 PositionerCorrectorPIDBaseSet
Name
PositionerCorrectorPIDBaseSet – Sets PIDBase parameters.
Input tests
- Refer to section 7.1: “Input Tests Common to all XPS Functions”.
- Checks the parameter values: all values must ≥0, else return “Parameter out of range
or incorrect” (-17)
- Checks the positioner name: (-18)
Description
This function configures the PIDBase parameters defined for the selected positioner.
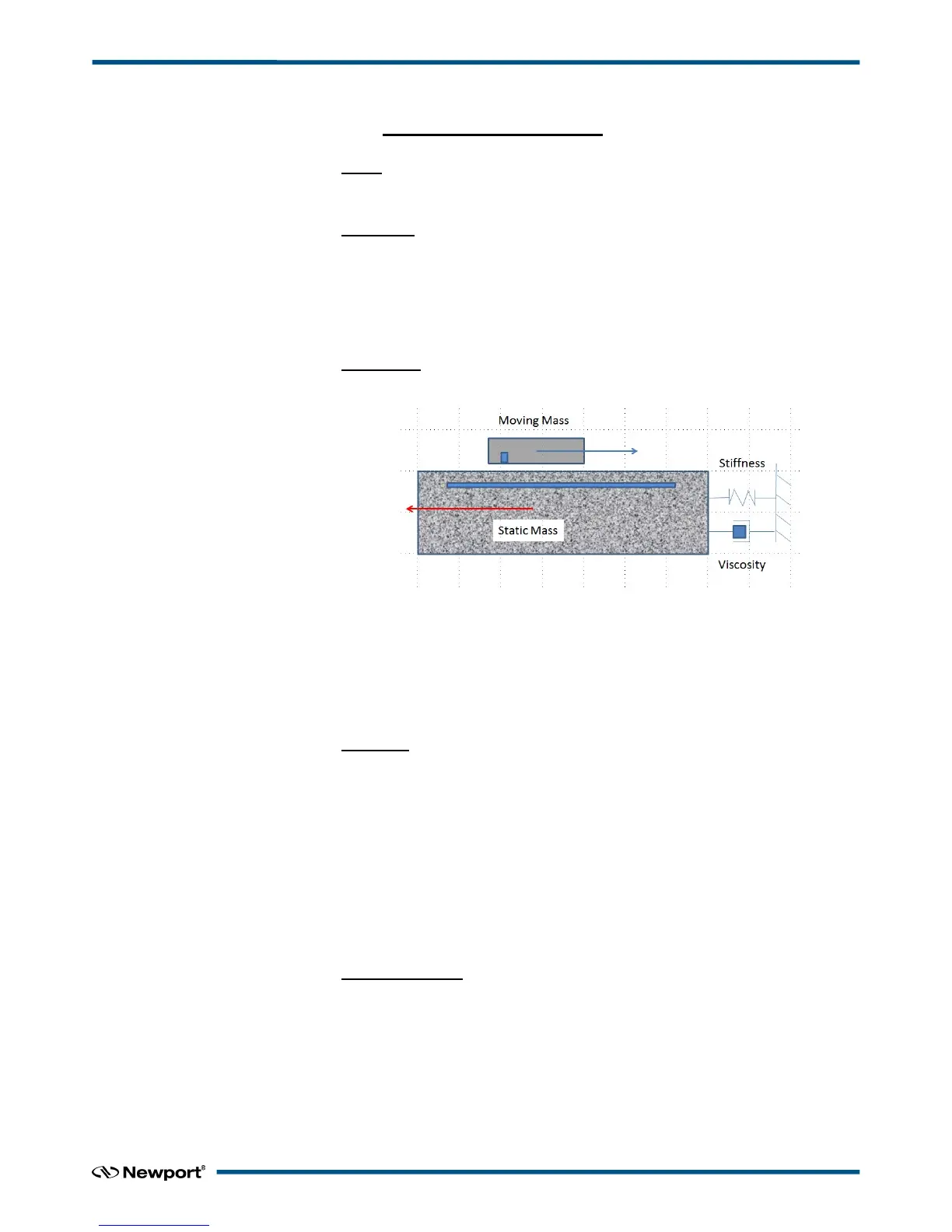
PIDBase parameters to set:
• MovingMass.
• StaticMass.
• Viscosity.
• Stiffness.
Prototype
int PositionerCorrectorPIDBaseSet(
int SocketID,
char * PositionerName,
double MovingMass,
double StaticMass,
double Viscosity,
double Stiffness
)
Input parameters
SocketID int Socket identifier gets by the
“TCP_ConnectToServer” function.
PositionerName char * Positioner name.
MovingMass double Mass of the stage moving part.
StaticMass double Mass of the stage static part (the base).
Viscosity double Viscosity of the base.
Stiffness double Stiffness of the base.
337 EDH0373En1023 — 01/18

 Loading...
Loading...










