4 - 59
4 Configuration and Wiring
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
4-3 Wiring Conforming to EMC Directives
4
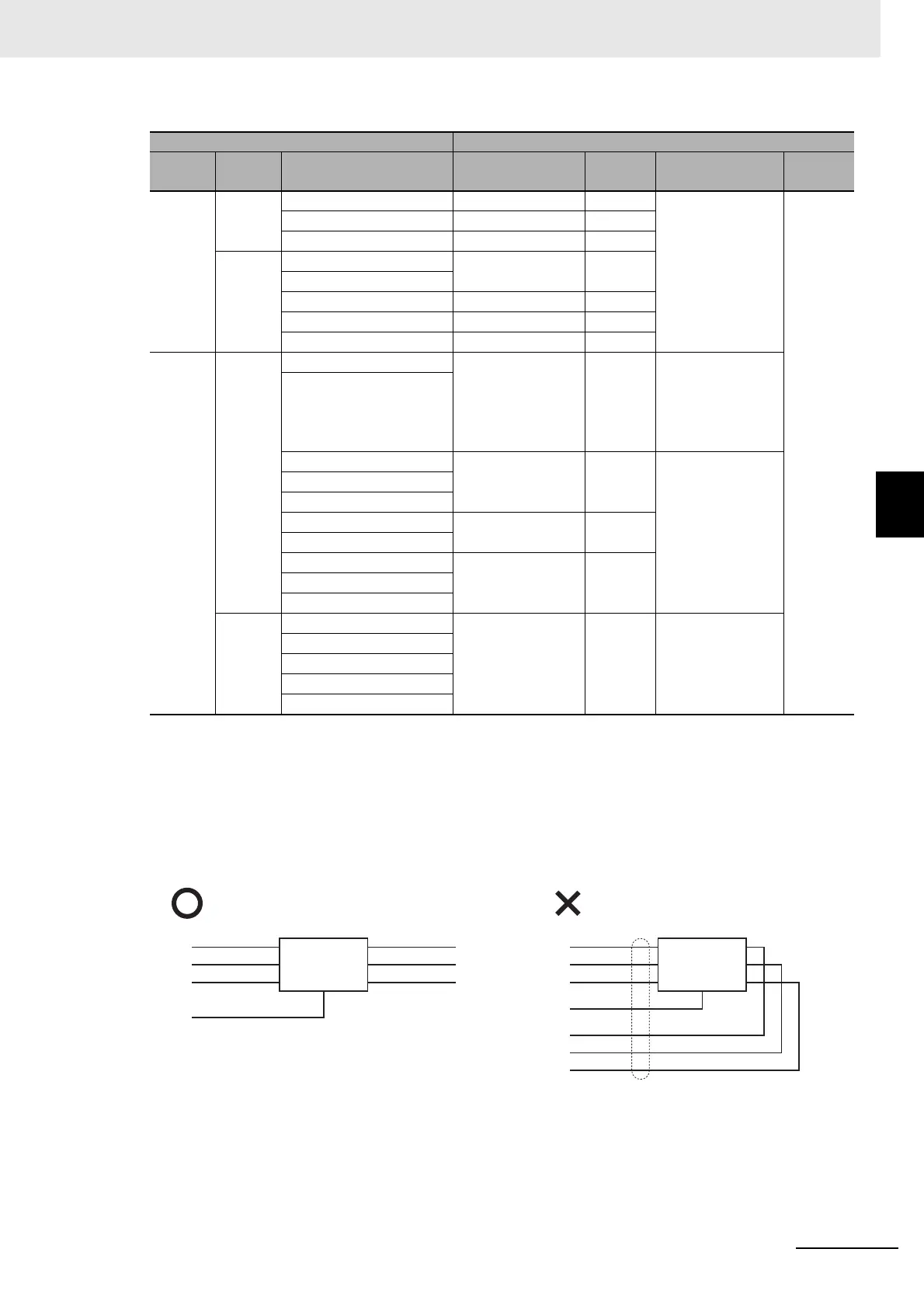
4-3-1 Peripheral Equipment Connection Examples
*1. Select a Noise Filter in accordance with the amount of the leakage current. If there is no problem with the
amount of the leakage current, you can select the R88A-FI1S202.
• If the molded case circuit breaker is located in an upper area and the power supply is wired through
the duct at the bottom, keep a sufficient distance between the input wires and internal wires, or use
the metal tubing for wiring. If input and output cables are placed in the same duct, the noise immunity
will be impaired.
• Place the noise filter as close as possible to the opening of the control panel. Use the diagram below
to the left for wiring.
Applicable Servo Drive Footprint-type Noise Filter
Phase Voltage Model Model
Rated
current
Leakage current
Manu-
facturer
Single-
phase
100 V R88D-1SN01L-ECT R88A-FI1S103 3 Arms 6.6 mA (at 200
VAC 60Hz)
OMRON
R88D-1SN02L-ECT R88A-FI1S105 5 Arms
R88D-1SN04L-ECT R88A-FI1S109 9 Arms
200 V R88D-1SN01H-ECT R88A-FI1S103 3 Arms
R88D-1SN02H-ECT
R88D-1SN04H-ECT R88A-FI1S105 5 Arms
R88D-1SN08H-ECT R88A-FI1S109 9 Arms
R88D-1SN15H-ECT R88A-FI1S116 16 Arms
3-phase 200 V R88D-1SN01H-ECT
R88A-FI1S202
*1
2 Arms 35 mA
(at 200 VAC 60Hz,
with delta connec-
tion and single
phase ground)
R88D-1SN02H-ECT
R88D-1SN01H-ECT
R88A-FI1S203
*1
3 Arms 14 mA
(at 200 VAC 60Hz,
with delta connec-
tion and single
phase ground)
R88D-1SN02H-ECT
R88D-1SN04H-ECT
R88D-1SN08H-ECT R88A-FI1S208 8 Arms
R88D-1SN10H-ECT
R88D-1SN15H-ECT R88A-FI1S216 16 Arms
R88D-1SN20H-ECT
R88D-1SN30H-ECT
400 V R88D-1SN06F-ECT R88A-FI1S309 9 Arms 27 mA
(at 400 VAC 60Hz,
with Y-connection
and a phase loss)
R88D-1SN10F-ECT
R88D-1SN15F-ECT
R88D-1SN20F-ECT
R88D-1SN30F-ECT
Separate I/O Noise filter less effective
NF
1
2
3
4
5
6
E
NF
1
2
3
4
5
6
E
AC input AC input
Ground
Ground
AC output
AC output

 Loading...
Loading...

