6 - 19
6 Basic Control Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
6-6 Profile Position Mode
6
Precautions for Correct Use
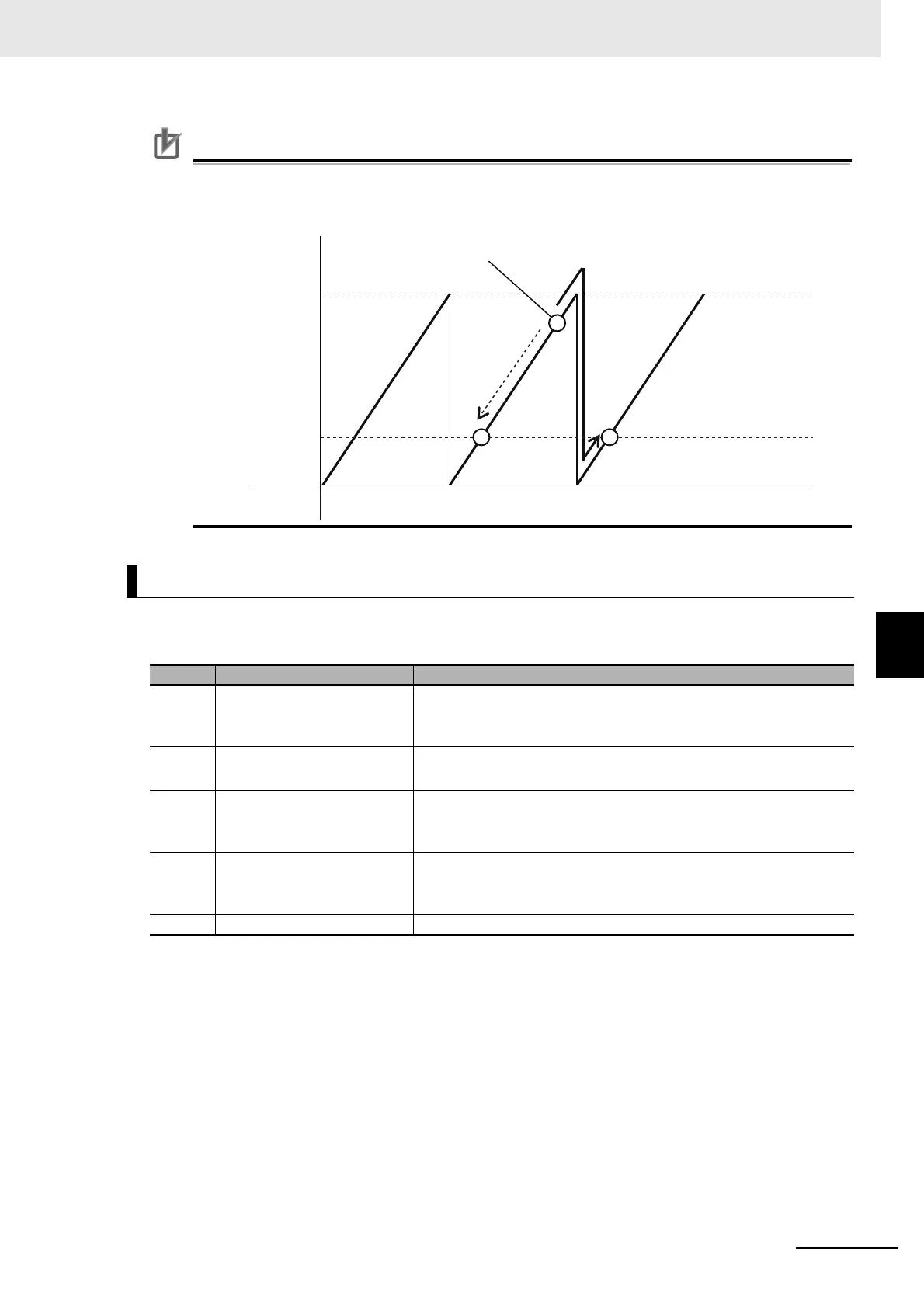
Depending on the positional relationship between the position actual value and target position,
operation is performed in the direction with a shorter travel distance.
The bits in Controlword used in the Profile position mode are explained below.
For the bits that are common to all modes, refer to A-1 CiA 402 Drive Profile on page A-2.
Controlword (6040 hex) in Profile Position Mode
Bit Name Description
4 New set-point Starts positioning at the rising edge, from 0 to 1, of the signal.
In this timing, the values of Target position (607A hex) and Profile
velocity (6081 hex) are obtained.
5 Change set immediately Always set to 1 (Change set immediately).
If set to 0, positioning does not occur due to a Command Warning.
6 Absolute/relative (abs/rel) Always set to 0 (abs).
If set to 1 (rel), positioning does not occur due to a Command Warn-
ing.
8 Halt When set to 0, positioning starts or continues.
When set to 1, positioning stops according to the Halt option code
(605D hex) setting.
9 Change on Set-point Unused for 1S-series Servo Drives.
7FFFFFF
FH
ex
80000000Hex
Position [Command unit]
Position
actual value
Operation in the direction with a
shorter travel distance
Target position

 Loading...
Loading...

