Appendices
A - 142
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
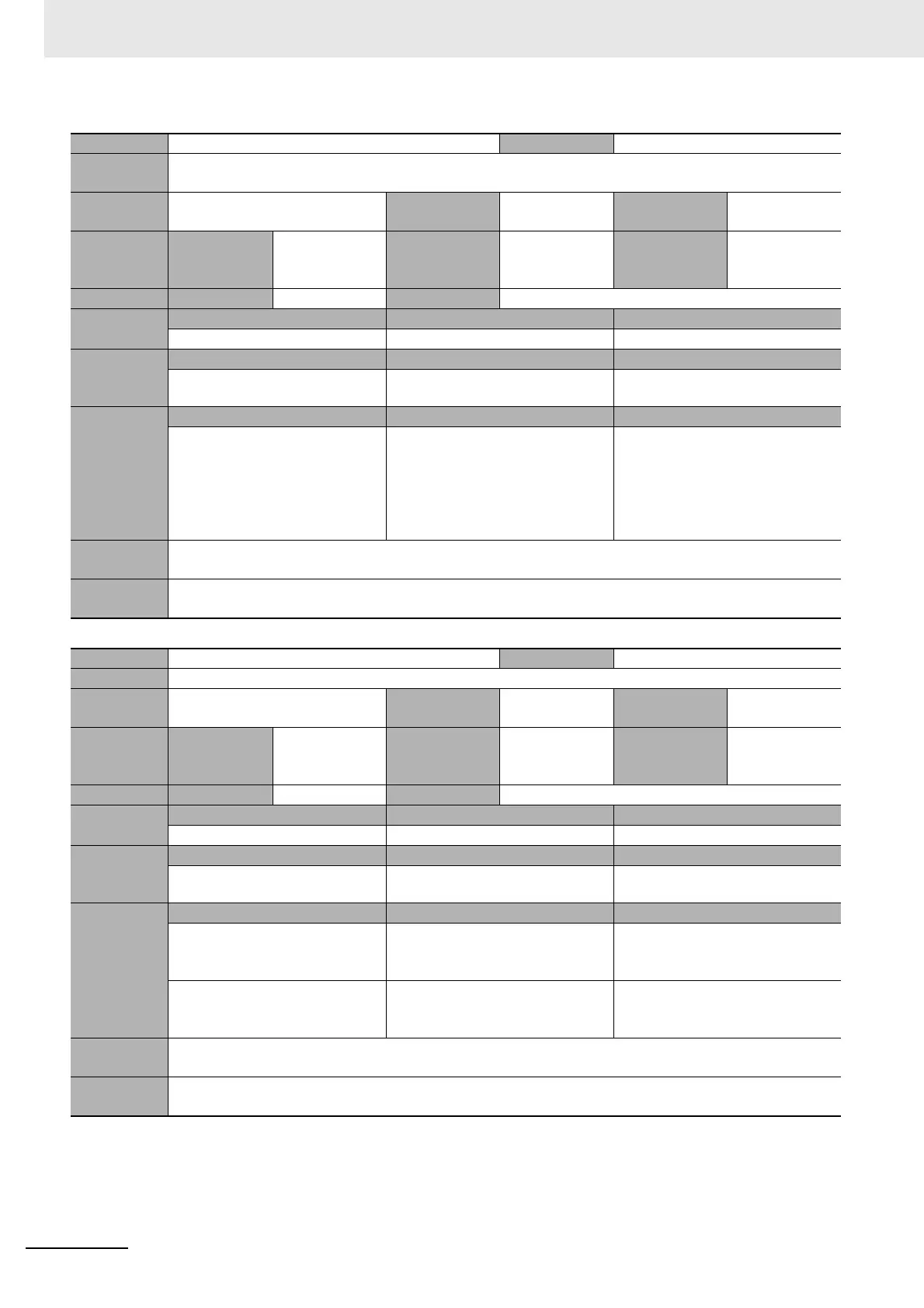
Event name Pulse Output Setting Error Event code 387B0000 hex
Description
The dividing numerator exceeded the dividing denominator when the Encoder Dividing Pulse Output -
Dividing Denominator was set to a value other than 0.
Source
EtherCAT Master Function Mod-
ule
Source details
Slave
Detection
timing
At power ON
Error
attributes
Level
Minor fault
Recovery
Error reset
(after cycling
slave power)
Log category
System log
Effects User program Continues. Operation Power drive circuit is OFF
Indicators
EtherCAT NET RUN EtherCAT NET ERR EtherCAT LINK/ACT
--- --- ---
System
-defined
variables
Variable Data type Name
None None None
Cause and
correction
Assumed cause Correction Prevention
The dividing numerator
exceeded the dividing denomina-
tor when the Encoder Dividing
Pulse Output - Dividing
Denominator was set to a value
other than 0
Correct the setting of Encoder
Dividing Pulse Output - Dividing
Denominator and Dividing Numer-
ator.
Set the Encoder Dividing Pulse
Output - Dividing Numerator to a
value smaller than the Dividing
Denominator.
Attached
information
None
Precautions/
Remarks
AL status code: -, Error No.: 2800 hex
Event name Motor Replacement Detected Event code 387C0000 hex
Description The connected motor is different from the motor that was connected the last time.
Source
EtherCAT Master Function Mod-
ule
Source details
Slave
Detection
timing
At power ON
Error
attributes
Level
Minor fault
Recovery
Error reset
(after cycling
slave power)
Log category
System log
Effects User program Continues. Operation Power drive circuit is OFF
Indicators
EtherCAT NET RUN EtherCAT NET ERR EtherCAT LINK/ACT
--- --- ---
System
-defined
variables
Variable Data type Name
None None None
Cause and
correction
Assumed cause Correction Prevention
The motor was replaced Perform the Motor Setup and
Absolute Encoder Setup.
After replacing the motor, perform
the Motor Setup and Absolute
Encoder Setup before use.
The Servo Drive was replaced Perform the Motor Setup. After replacing the Servo Drive,
perform the Motor Setup before
use.
Attached
information
None
Precautions/
Remarks
AL status code: -, Error No.: 9505 hex

 Loading...
Loading...

