8-56
JOG positioning control Type 0 (F171)
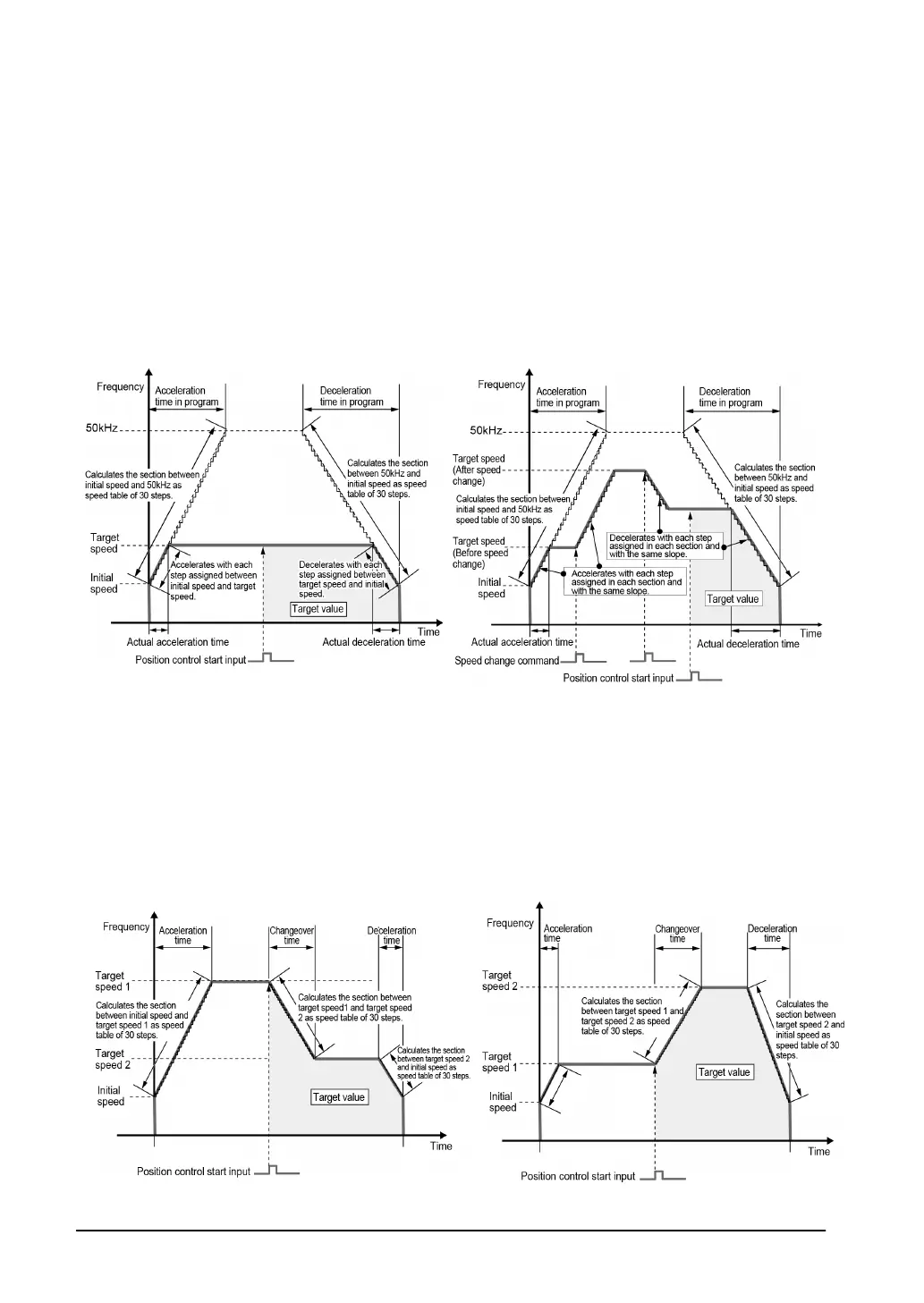
- Specify the time from the initial speed to the maximum speed (50 kHz) as acceleration time and the
time from the maximum speed (50 kHz) to the initial speed as deceleration time in the program. The
actual acceleration/deceleration time is relatively shorter than the specified acceleration/deceleration
time.
- Each section between the initial speed and the maximum speed (50 kHz), and between the maximum
speed (50 kHz) and the initial speed is divided into the speed table of 30 steps to calculate the speed.
Therefore, the acceleration/deceleration is not as smooth compared to the JOG positioning control
Type 1 especially when the target speed is low. To use in a low-speed area with a device such as a
stepping motor, select the type 1.
- After the execution of the instruction, the speed can be changed within the range of the maximum
speed (50 kHz).
JOG positioning control Type 1 (F171)
- Specify the time from the initial speed to the target speed 1 as acceleration time, the time from the
target speed 1 to the target speed 2 as the changeover time and the time from the target speed 2 to the
initial speed as deceleration time in the program.
- Each section between the initial speed and the target speed 1, between the target speed 1 and the
target speed 2, and between the target speed 2 and the initial speed is divided into the speed table of
30 steps to calculate the speed. Therefore, the acceleration/deceleration is smoother compared to the
JOG positioning control Type 0.
- The speed cannot be changed after the execution of the instruction.