8-45
Sample program: JOG positioning operation: Type 0
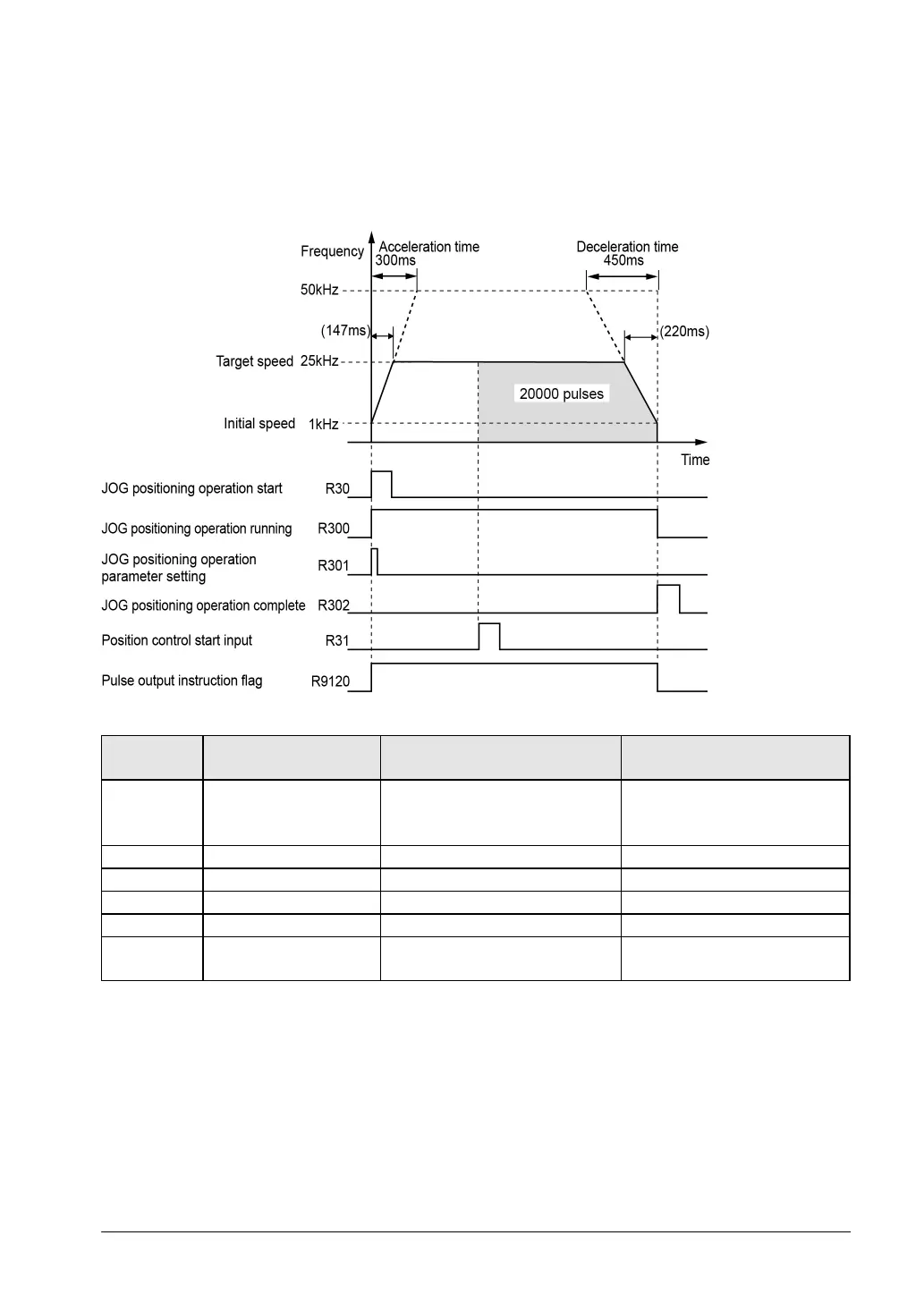
- When the trigger (execution condition) is on, the JOG operation is started. When the position control
start input turns on, a specified pulse is output and the deceleration stop is performed.
Time chart
Data table
Data
Setting item (Unit) Example of sample program Settable range
DT300 Control code
JOG positioning Type 0
CW/CCW
Set according to the control
code on the next page.
DT302 Initial speed (Hz) K1000 K1 to K50000
DT304 Target speed (Hz) K25000 K1 to K50000
DT310 Target value (pulses) K20000
K-2,147,483,648 to
K+2,147,483,647
Note)
1.Each setting item occupies 2-word data registers.
2.For the type 0 of JOG positioning control instruction (F171), the time from the initial speed to the
maximum speed (50 kHz) is specified as acceleration time or deceleration time. For the details, refer to
"8.4.17 Difference in Acceleration/Deceleration Characteristics Between Instructions".
3.When the target value is set to zero, the operation stops once the position control start input turns on.