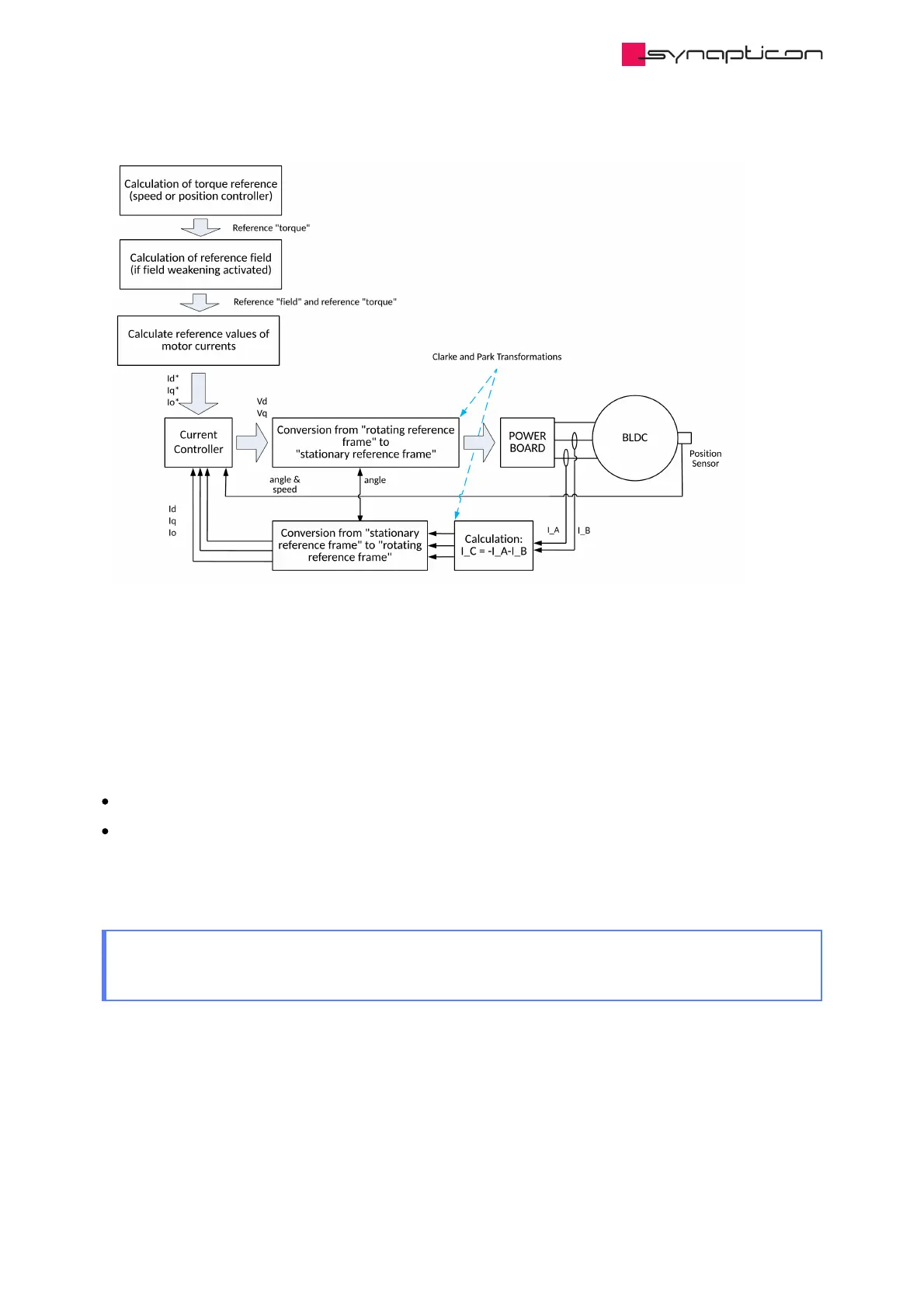
Figure 3: Torque loop
structure
3.1.8.1.1.1.4 Tuning of the current controller
The controller can be fine-tuned by directly setting two parameters:
Settling time (subitem 0x2010:10)
Damping ratio (subitem 0x2010:11)
Settling time is entered in [µs], the default value 1000 µs.
Damping ratio is entered in [per mill], the default value is 2000 ‰.
Example:
For a damping ratio of 0.7, the entered value should be 700 [per mill].
 Loading...
Loading...

