xviii
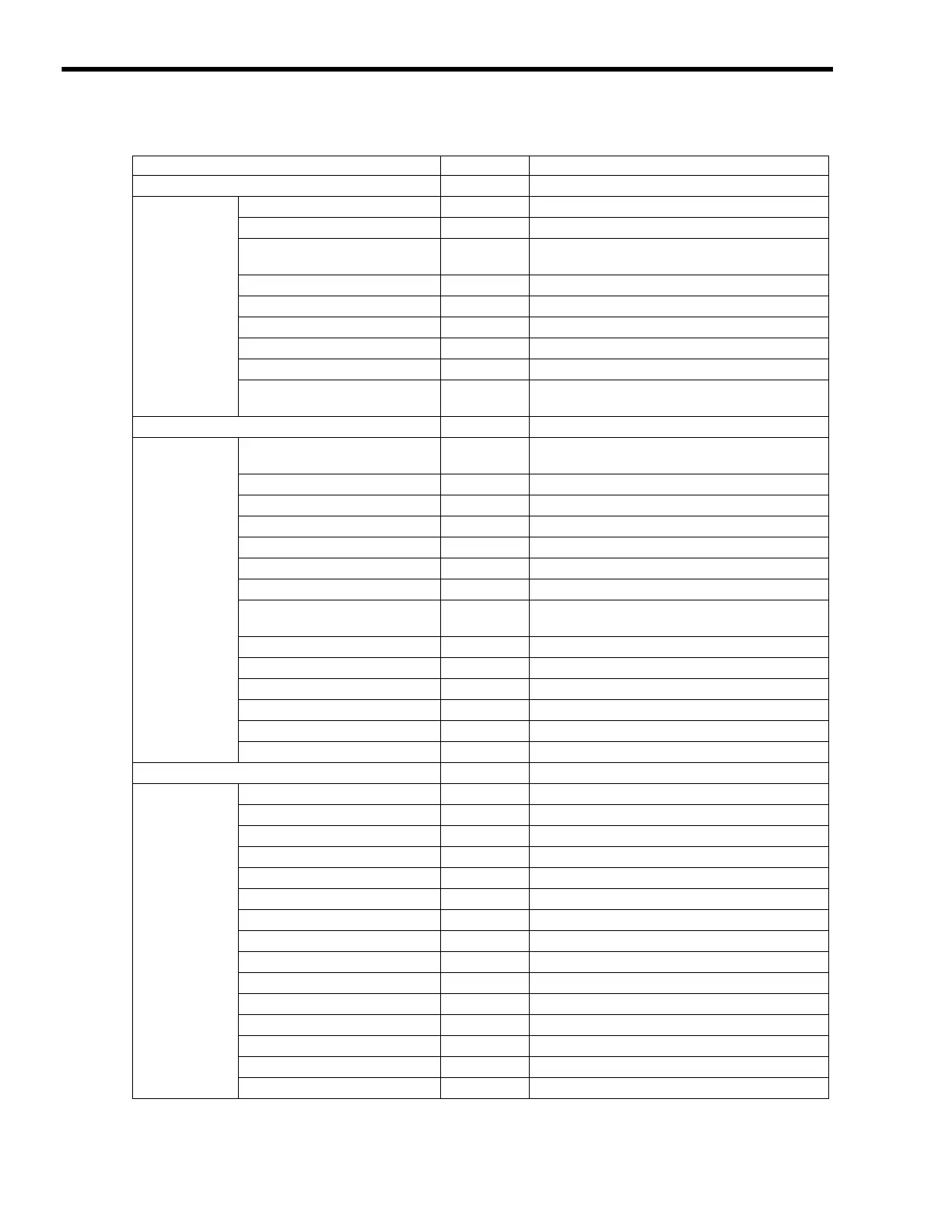
Gain
-Gain
IntegralClear
OB
xx0
0B
Resets position loop integral value.
PhaseFeedForward
OWxx31 Add to the speed in 0.01%
PositionFeedForward
OWxx30
Feed Forward adds to the position to increase
response
PositionIntegration
OWxx32 Time in ms used to integrate the position error
PositionLoop
OWxx2E Increase value for more rigid control.
Select
OBxx014 Enables second set of servo gain parameters.
SpeedIntegration
OWxx34 Time in ms used to integrate the speed error
SpeedLoop
OWxx2F Increases value for more rigid dampening.
SpeedLoopType
OBxx013
Closes speed loop using Proportional and Integral
control(0) or P control(1).
Home
-Home
ApproachSpeed
OLxx3E
Speed used in the first or second stage of homing
depending on type
AtHome
IBxx0C4 At home position (ZERO)
AtHomeN
IBxx2C6 Servo status ZPOINT
Complete
IBxx0C5 Home complete
CompleteWindow
OWxx3D The window used to set the home complete bit
CreepSpeed
OLxx40 Speed used to locate the "c" channel or marker pulse
DecelerationLS
OBxx058 Selects homing deceleration LS signal.
Define
OLxx48
Redefine the coordinate system. In position mode, the
servo will move when this variable is changed.
Direction
OBxx093 Selects home direction.
ForwardLimit
OBxx05A Selects homing forward limit signal.
InputSelect
OBxx05B Selects homing input signal.
Method
OWxx3C The type of homing to perform
Offset
OLxx42 Offset distance used at the end of homing
ReverseLimit
OBxx059 Selects homing reverse limit signal.
IO
-IO
All
IWxx2E Servo I_O mask
Brake
IBxx2E9 Servo I_O BRK
EXT1
IBxx2E6 Servo I_O EXT1
EXT2
IBxx2E7 Servo I_O EXT2
EXT3
IBxx2E8 Servo I_O EXT3
Home
IBxx2E2 Servo I_O DEC
IO12
IBxx2EC Servo I_O IO12
IO13
IBxx2ED Servo I_O IO13
IO14
IBxx2EE Servo I_O IO14
IO15
IBxx2EF Servo I_O IO15
NegativeOvertravel
IBxx2E1 Servo I_O N OT
PhaseA
IBxx2E3 Servo I_O PA
PhaseB
IBxx2E4 Servo I_O PB
PhaseC
IBxx2E5 Servo I_O PC
PositiveOvertravel
IBxx2E0 Servo I_O P OT
(continued)
Variable Name Register Comments

 Loading...
Loading...




