6.3
Motion Parameter Details
6-9
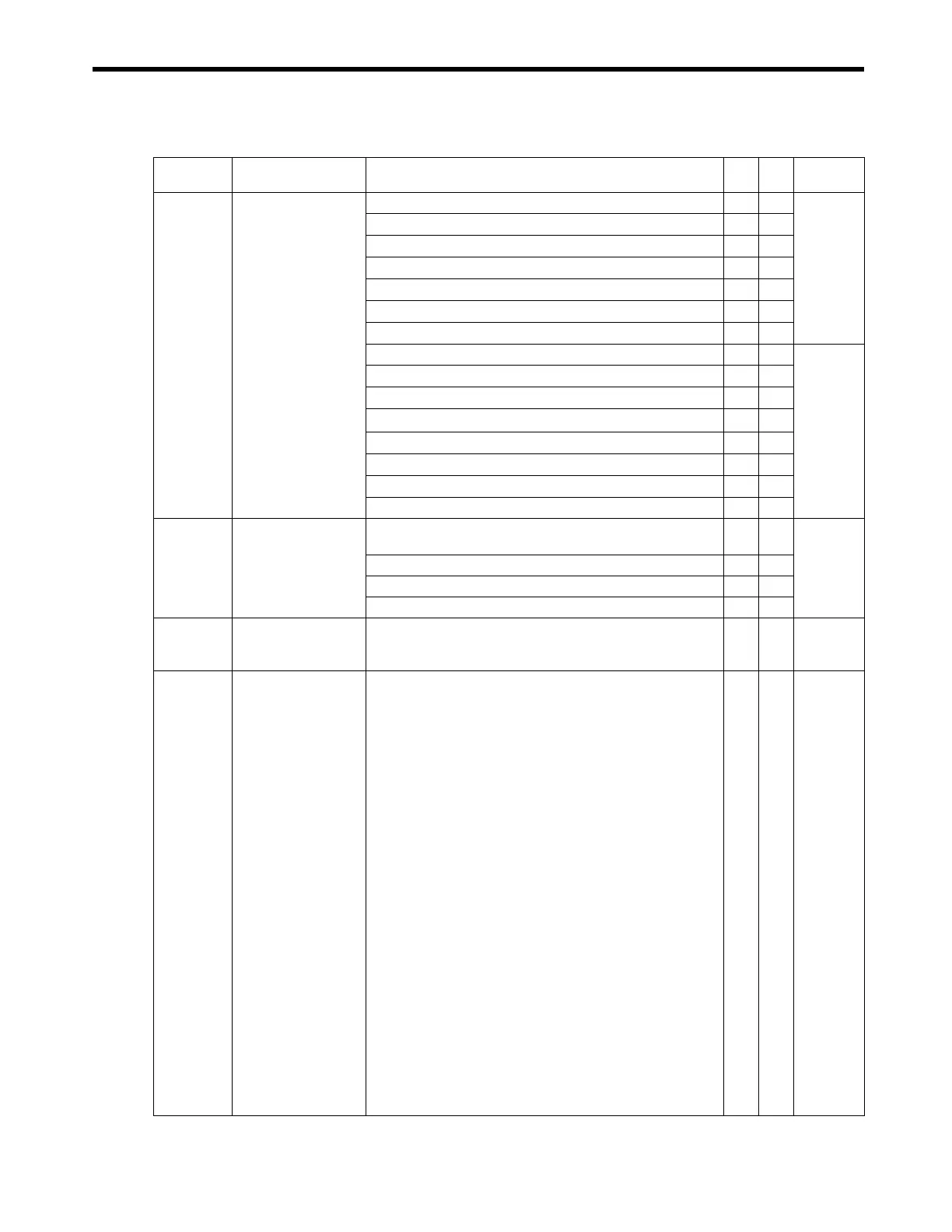
OW04
Function 2
Bits 0 to 3: Latch Input Signal Type
6-28
0: -
1: -
2: Phase-C pulse input signal
Yes
3: /EXT1
Yes
4: /EXT2
Yes
5: /EXT3
Yes
Bits 4 to 7: External Positioning Signal
6-28
0:
−
1:
−
2: Phase-C pulse input signal
Yes
3: /EXT1
Yes
4: /EXT2
Yes
5: /EXT3
Yes
Bits 8 to F: Reserved for system use.
OW05
Function 3
Bit 1: Close Position Loop Using OL
16 (Disable Phase
Reference Generation) (0: Enabled/1: Disabled)
Yes
6-28
Bits 2 to A: Reserved for system use.
Bit B: INPUT Signal for Zero Point Return (0: OFF/1: ON)
Yes
Bits C to F: Reserved for system use.
OW06
to
OW07
−
Reserved for system use.
−− −
OW08
Motion Command
0: NOP (No Command)
1: POSING (Positioning)
2: EX_POSING (External Positioning)
3: ZRET (Zero Point Return)
4: INTERPOLATE (Interpolation)
5: ENDOF_ INTERPOLATE (Reserved)
6: LATCH (Latch)
7: FEED (JOG Operation)
8: STEP (STEP Operation)
9: ZSET (Zero Point Setting)
10: ACC (Change Linear Acceleration Time Constant)
11: DCC (Change Linear Deceleration Time Constant)
12: SCC (Change Filter Time Constant)
13: CHG FILTER (Change Filter Type)
14 : KVS (Change Speed Loop Gain)
15 : KPS (Change Position Loop Gain)
16: KFS (Change Feed Forward)
17: PRM_RD (Read SERVOPACK Parameter)
18: PRM_WR (Write SERVOPACK Parameter)
19: ALM_MON (Monitor SERVOPACK Alarm)
20: ALM_HIST (Monitor SERVOPACK Alarm History)
21: ALMHIST_CLR (Clear SERVOPACK Alarm History)
22: ABS_RST (Reset Absolute Encoder)
23: VELO (Speed Reference)
24: TRQ (Torque Reference)
25: PHASE (Phase Reference)
26: KIS (Change Position Loop Integration Time)
Yes Yes 6-29
(cont’d)
Register No. Name Contents SVB SVR
Reference
Page

 Loading...
Loading...




