Maintenance 3. Covers
N6 Rev.2 139
3.10 Arm #3 Cover
CAUTION
■
When installing the cover, b
e careful not to get the cables caught in it or bend
m forcibly to push into the cover.
Unnecessary strain on cables may result in damage to the cables, disconnection,
and/or contact
failure. These are extremely hazardous and may result in electric
shock and/or improper function of the robot system.
routing the cables, check the cable locations at removing the cover. Be
place the cables back to their original locations.
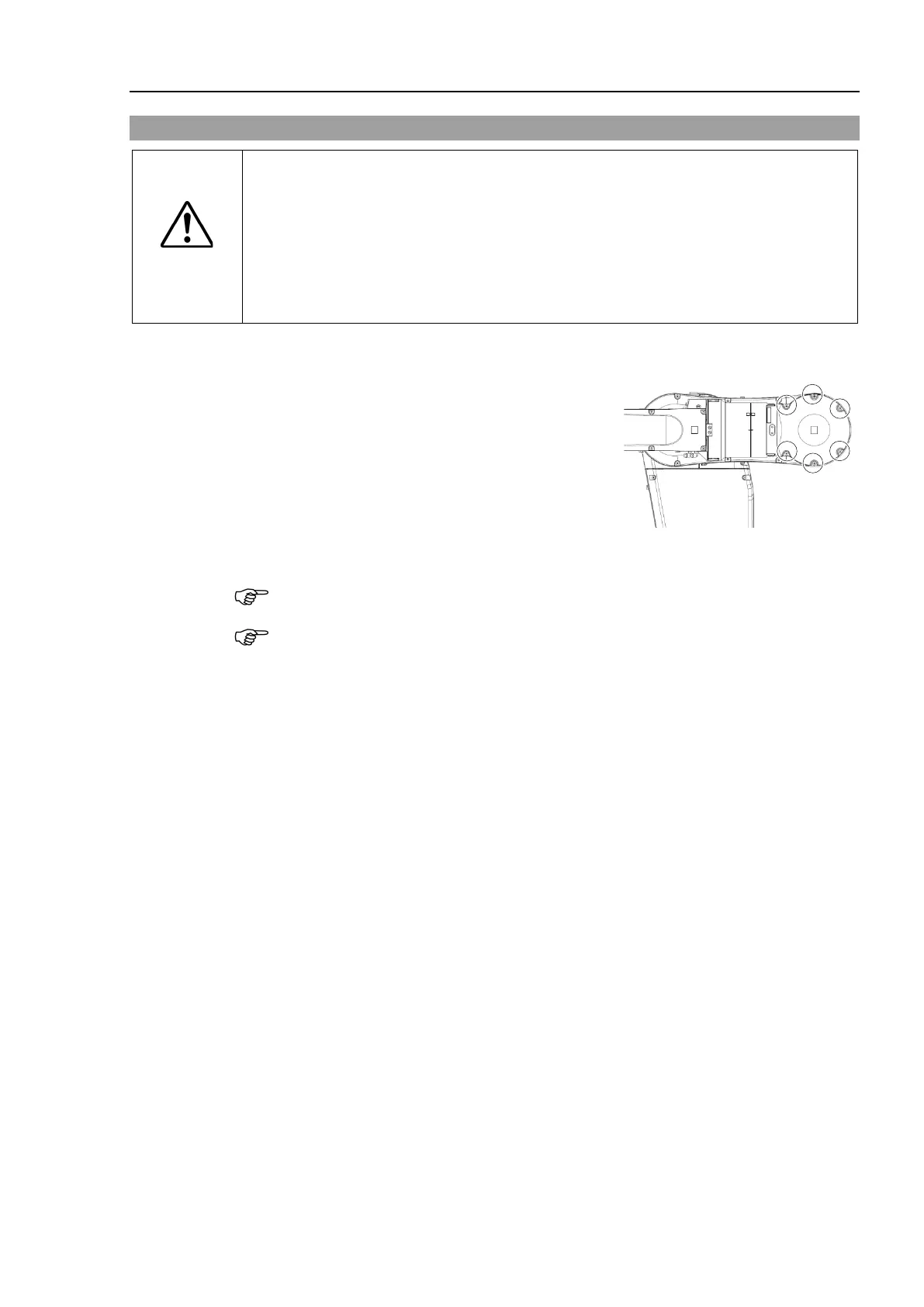
Remove the screws, and then remove the Arm
#3 cover.
Cross recessed binding head machine screw:
6-M4×8
Set the Arm #3 cover to the
Manipulator and fix
Cross recessed binding head machine screw:
6-M4×8
Tightening torque: 0.45 ± 0.05 N·m
e careful not to get the cables caught in the arm.
The cover may get broken if it is
fastened too tight.
e careful not to exceed the above tightening torque.

 Loading...
Loading...







