Setup & Operation 4. End Effectors
64 N6 Rev.2
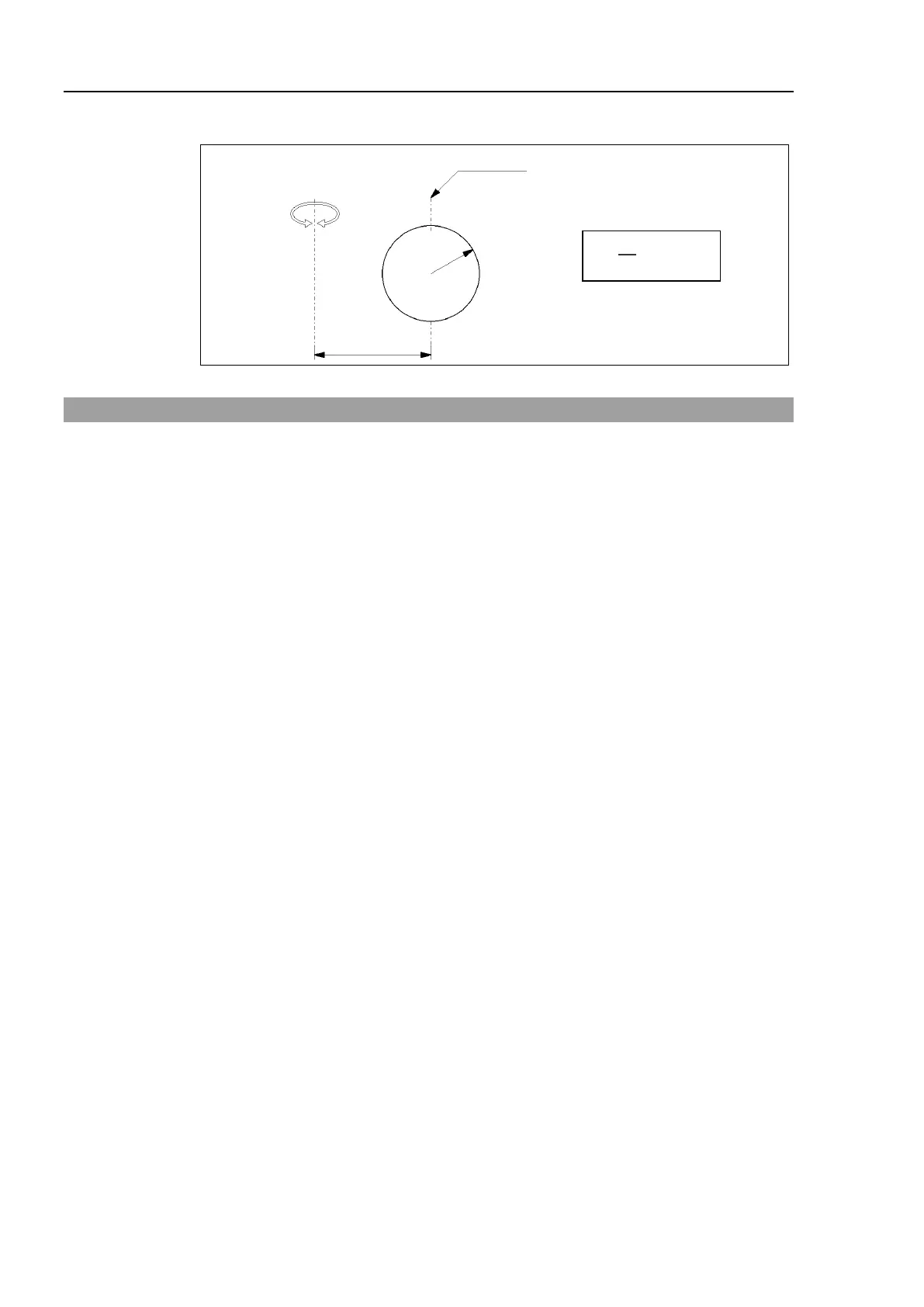
(c) Inertia moment of a sphere
Sphere’s Center of Gravity
4.4 Precautions for Auto Acceleration/Deceleration
The speed and acceleration/deceleration of the Manipulator motion are automatically
optimized according to the values of WEIGHT and INERTIA and the Manipulator’s
postures.
WEIGHT Setting
The speed and acceleration/deceleration of the Manipulator are controlled according to the
load weight set by the WEIGHT command.
The more the load weight increases, the more the speed and acceleration/deceleration are
reduced to prevent residual vibration.
INERTIA Setting
The acceleration/deceleration of Arm #6 are controlled according to the inertia moment set
by the INERTIA setting. The acceleration/deceleration of the whole Manipulator are
controlled according to the eccentricity set by the INERTIA setting. The more the inertia
moment and eccentricity of the load increase, the more the acceleration/ deceleration are
reduced.
Auto Acceleration/Deceleration According to Manipulator’s Posture
The acceleration/deceleration are controlled according to the Manipulator’s posture.
When the Manipulator extends its arms or when the movement of the Manipulator
produces vibration frequently, the acceleration/deceleration are reduced.
Set appropriate values for WEIGHT and INERTIA so that the Manipulator operation is
optimized.

 Loading...
Loading...







